director ONL | emeritus professor Hyperbody TU Delft [2000-2016] | professor Qatar University [2017-2019] | consultant Qatar Robotic Printing Qatar University [2019-2022] | email oosterhuis@oosterhuis.nl
Some days ago I shared a video of a swarm of thousands of starlings. This shared video quickly has over hundred likes, it sure appeals to people’s expectations of what is beautiful. I added two words:swarm architecture. In other words I linked the image of the swarm to architecture, notably my own.
No metaphor
Now how can a recording of a dynamic swarm possibly link to something that is as static as architecture? [the answer is literally blowing in the wind]. I certainly did not refer to the swarm as a superficial reference only, and it is explicitly not meant as a metaphor. I hate metaphors, my design attitude is based on what it is, not what it looks like.
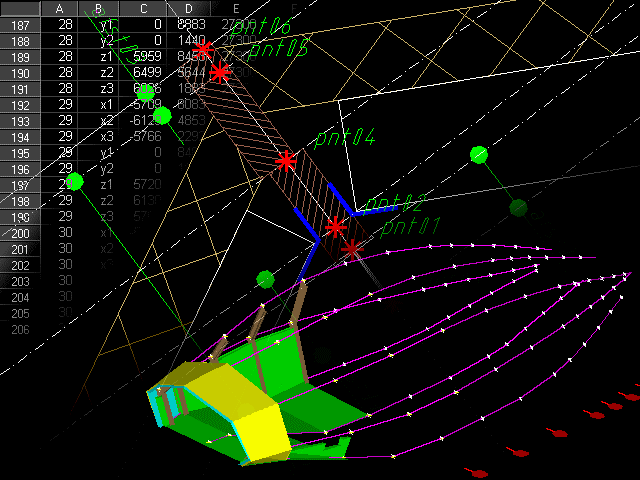
point cloud of reference points | waterpavilion | design kas oosterhuis | 1997
So what is the swarm in my architecture? It really started 20 years ago when we were designing and executing the Waterpavilion at Neeltje Jans in Zeeland. To actually build the steel structure we found out that describing [scripting] the exact geometric relations between the reference points on the control curves would form the best basis for the communication with the production machines. We realized that CNC production machines do not read drawings but process data instead. So we decided to produce data which were directly used by the algorithms running the machines. It was the birth of deep parametric design to production.
Dynamic system
Now we learned how to describe the relations between reference points of the point cloud, we realized that we were actually doing something very similar to what birds do in a flock. The birds follow some simple rules as to form the flock. Yet the birds execute their rules as a player in a running complex adaptive system, similar to being a player in a game. This triggered me to think of architecture as a dynamic system, not only in the design phase where everything is still moldable, but also in its behavior as a built structure. That being noted, I invented the Trans-Ports multimodal pavilion in the years 1999 – 2000. The Trans-ports pavilion is a structure that changes shape and content in real time as to accommodate changing use over time. Keywords that I used from then on: time based architecture, real time behavior, multimodality, interactive architecture. The nodes of the dynamic structure act as in a swarm, they look to their immediate neighbors as to change position and information content.
realtime behavior| trans-ports version 3.0| design kas oosterhuis | 1999
In that same year I was invited to make an interactive installation for the Venice Architecture Biennale in 2000. As proof of concept for multimodality and real time behavior I designed together with Ilona Lénárd the interactive painting titled Handdrawspace, 360 degrees projected on the 3 curved screens around the central arena for the interaction with the public. The public would move between center and periphery of the arena and trigger arrays of sensors informing the algorithms. The algorithms controlled the number of dots, the size of dots, and the background colors.
Everything we have done since, whether interactive installations or built structures, notably the Web of North-Holland, the A2 Cockpit, the Bálna Budapest, the LIWA tower in Abu Dhabi are further steps in the development of that basic concept of the swarm. Without compromise, the logic of the swarm functioned as the very genetic material facilitating our design language.
NB: I have written since quite a number of articles on swarm architecture [google entry: swarm architecture kas oosterhuis].
The title of this blog leaves no doubt. I am not a fan of parametricism, while everything we do at my innovation studio ONL and at my chair Hyperbody at the TU Delft is fundamentally parametric. I will explain why. I do not think that it is a matter of definitions, but a matter of understanding of what parametric design is about. It certainly is not a style, and it should never be seen as such. In his lecture at the symposium Artificial Intuition [1990] of which I managed the content at the Faculty of Architecture at the TU Delft Robert Aish told us that parametric design was something he was doing already back in the seventies while working for a Polish shipbuilder. Since a ship does not have a repetitive section through its body due to the streamline of the ship he developed a detail of which the values would adapt to their changing position in the body. That is parametric indeed, although Aish had a better word for it, he named it Associative Modelling. Parametric design means modelling associations between the components, which a ship or a building is made of. Associations are a form of dynamic entanglement. When one part changes its values, the associated parts change with it.
Bidirectional relationship
Since the early nineties my short definition of parametric design is the art of establishing dynamic relationships. Adaptive relationships of parts to parts, of things to things, of objects to objects, whether in the virtual realm or in the materialized world. Related to parametric design, but not the same, is interactive architecture, which I define as the real time relationships of people to things, and the other way round. Relationships are per definition bidirectional and never static. Relationships are constructed by acting in a complex adaptive system. Such is the case with parametric design, a parametric relationship acts both ways and in multiple ways.
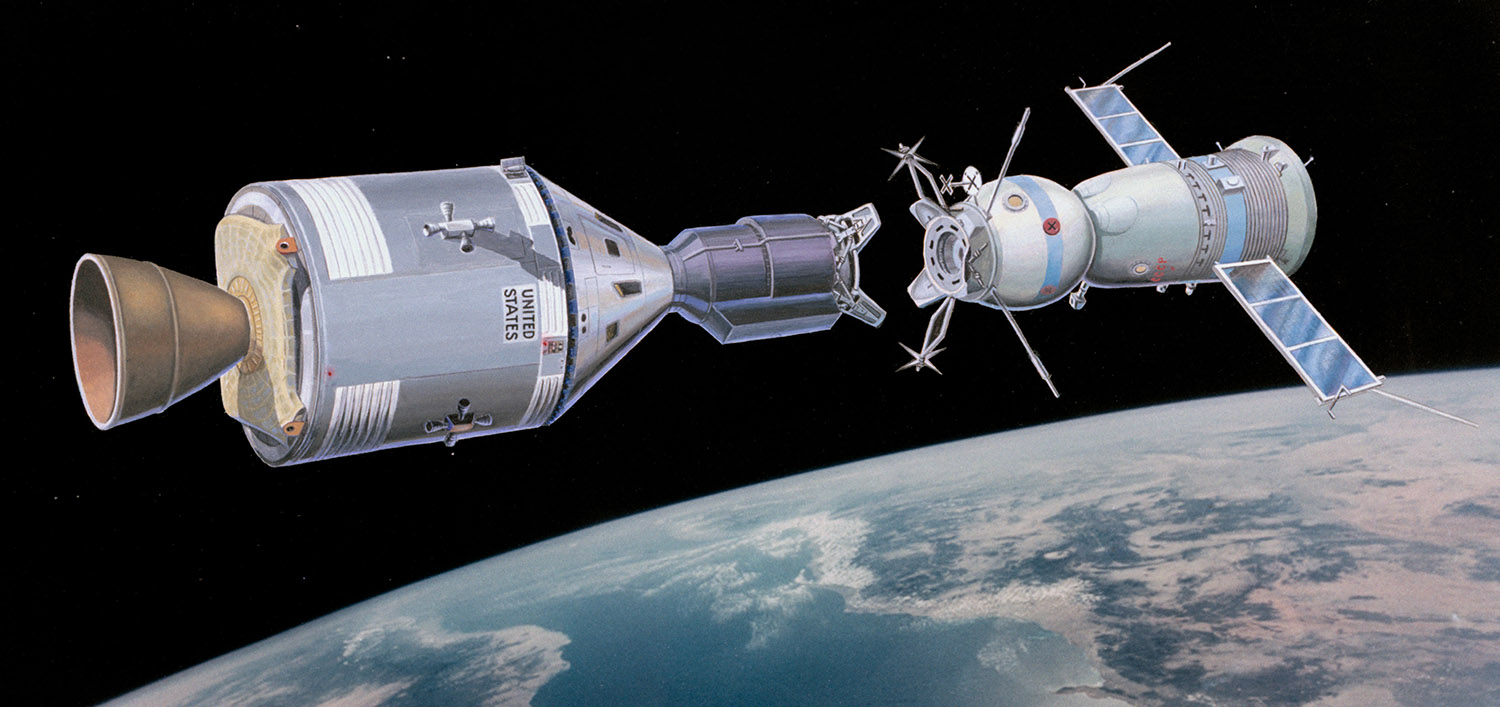
apollo soyuz connection | 1975
Apollo < > Soyuz
An associative relationship does not necessarily mean that the neighboring part is similar in its shape or dimensions. Entangled parts can be of a different family and of a different order. I can illustrate this with my favourite yet one-dimensional form of a parametric relationship, which is the relation between the Soviet Soyuz and the American Apollo capsules docking in space. This happened back in the seventies of last century and it was a huge accomplishment, and of high political and technical importance. American and Russians embarked on a shared process of exchanging visions, views and data, eventually leading to the agreement on one single common docking ring. It basically meant that the Soyuz and the Apollo fitted exactly, in one moment in time, at one specific location, with one specific set of shapes and dimensions. It is this exactness of the association that is key to parametric design. In the world of parametric design one establishes exact relationships between parts, entangled as to adapt to the variations of the neighboring part.
ruling curves | waterpavilion | ONL 1997
Waterpavilion
While designing the Waterpavilion [ONL, 1997] we linked the reference points on the main 8 curves, define the geometry of the sculpture building, to the reference points of the steel structure, to the skin and the continuous variable fins gradually emerging out of the main body to emphasize the curvature. Structure, skin and featured fins were linked into one coherent parametric system. Associatively linked since in each instance on the curve the relative values of their mutual distances and angles would change with their positions along the curve. These relationships were not modeled in a existing CAD program but scripted from scratch using Autolisp routines. Drawings and 3d models are meaningless in a dynamic parametric world. The associations are defined with formulas and algorithms, describing their mutual relationships. Scripting is a very lean method of design, consuming very little data, exported to and retrieved from a database.
Patricism
What is often considered as a parametric design is mostly nothing more than a fashionable form of tessellation of the surface, covering only a literally superficial part of the design / building. The real power of parametric design is to link all constituting components to each other, including floor, wall, roof such that when And staying within the limitations of such a mono-culture of similar yet not the same parts, one could indeed speak of a style, largely subject to fashion and voluntary follower of built-in commands of certain design software. Yet it would be unjust to the full potential of parametric design to declare the superficial qualities of being similar yet not the same a mainstream design movement, whether or not labelled as parametricism. To do that is a populist act, not respecting what are the underlying values. I remember having stated in my letter to Alvin Boyarsky describing my vision as unit master at the Architectural Association [AA] in London [1988-1989], that I reject all -isms. Then my rebellion was against modernism and its counterpart post-modernism, constructivism and its counterpart de-constructivism, both of which were deeply adhered to at that time at the AA. But I wanted no more -isms. So it may not be surprising that I became allergic to the term parametricism, which is nothing more than an attempt of Patrick Schumacher to become the founder and leader of a populist movement, feeding upon the supramatist sometimes bigoted calligrahic sweeps by the late Zaha Hadid [read my blog Calligraphic Sweeps]. His attempt to establish a mainstream movement would be more appropriately labeled patricism, more than anything else.
While modernism is an attitude which attempts to look modern, yet in its essence is not modern but retro-actively looking like something modern, and constructivism is an attempt to look like a logical structure but in fact isn’t, the container term parametricism is fit for designs that look parametric but not necessarily are parametric. I feel that it is important to make the distinction. For example the Reiser Umemoto Swiss Cheese tower in Business Bay in Dubai [2014] may be considered parametric, while it is not parametric at all. Yes, it features 5 different sizes of openings in the concrete exoskeleton in a seemingly random fashion, but that is exactly why it is not parametric. In a parametric design all openings would have been unique in their shape, any sameness would be a pure co-incidence. at the other end however, ONL’s LIWA tower is by and large parametric, linking the curved geometry drivers to the Gross Floor Area [GFA] calculations, to the steel structure and to the skin in one coherent relational system. All windows of the LIWA tower are unique in shape and dimensions, all structural X-crosses are unique in shape and dimension, and both systems are parametrically linked to each other. Changing the position of one reference point on the curve changes all windows and steel components on at least two ruled surfaces of the body wrap, while maintaining the set value for the GFA.
Genetic structure
Parametric design systems must and can be developed further, until the point that all constituting components have become an acting part of the system. Building components are seen as actors in a dynamic and open relational design system. The design that comes close to this point is ONL’s BYYU Body Chair, where all bits and pieces are associated part in one coherent complex adaptive system, where at the front end the customer can set individual preferences, while at the back end the design is directly linked to the data driven robotic waterjet-cut production of the pieces. Only when having a fully functional parametric design system one can establish such direct link from design to production, from customer to end-user, which explains the relevance of treating parametric design systems not as something it looks like, but as something what it is deep down in its genetic structure.
Everyone has once been amazed to see how birds are flocking in the air. Much has been said about the simpe rules the birds are executing when flocking. The birds are constantly aware of their neighbours, avoid collision, keeping agreed distance, adapting to the neighbours direction, striving at a more central position in the flock. Their flocking behaviour has been modelled in simple computer graphics, back in 1986 Craig Reynolds [red3d.com]made a computer model of animal motion, scripting the rules for the creatures he named boids, based on three dimensional computational geometry. Why then are we interested in boids and swarms of birds. Why did I introduce the term swarm architecture back in 2001 during the first Game Set and Match Conference I organised at the TU Delft [hyperbody.nl]? My objective has been clear from the beginning: I wished then and still wish now to identify all possible building components as interacting elements building up bi-directional relations with each other. The idea of behaviour intrigued me because it would lay the foundations for an archtecture that is not static but animated in real time. Animated not as was described by Greg Lynn in his book Animated Form [1998], who de facto claimed his license to kill the animation, but animated in its purest meaning, keeping the structure informed, much like the flock of birds. I concluded that there is no meaning in freezing the motion, I realized we needed to use actual ICT technology to sustain the information flow throughout the complete life-cycle of the built structure.