


director ONL | emeritus professor Hyperbody TU Delft [2000-2016] | professor Qatar University [2017-2019] | consultant Qatar Robotic Printing Qatar University [2019-2022] | visiting professor INDA Chulalongkorn University Bangkok [2023-2024] | email oosterhuis@oosterhuis.nl


















https://www.slideshare.net/slideshow/a49-lecture_11-july-2024_without-video-pptx/271530089



Summary lecture “The Component” by Kas Oosterhuis
My new book is titled “The Component, a Personal Odyssey towards Another Normal”. Complex active components – as opposed to static elements – act as well-informed and unique building parts that establish a real time relationship with their immediate neighbors, as do birds in a swarm. Complexity is an emergent property of simple rules: complex but not complicated. My personal odyssey wanders from earlier realised projects that are based on mass-production methods to featured realised projects [Saltwater Pavilion, iWEB A2 Cockpit, Bálna Budapest, Liwa Tower Abu Dhabi] which are based on radical parametric design to robotic production methods, and – its ultimate destiny – to projects that display real time behavior, changing shape and content in real time, which is the default condition of ubiquitous digitalization in the Another Normal. Nomadic international citizens are the inhabitants of the Another Normal. The Another Normal is as of now a hypothetical parallel world. Urged by the climate crisis, the food, energy, and water nexus, the COVID-19 pandemia, and the current AI storm, the Another Normal demonstrates the inevitable data-driven techno-social architecture of the physically built environment and the metaverse. Besides robotic production on demand of almost anything – when, where, and as needed – I propose strategies that run in parallel to establish the Another Normal, among others: ubiquitous basic income, global birthright to own a generous piece of land, distributed production of healthy food, clean energy and drinking water, ownership of private data and personal avatars in the web 3.0, autonomous electronic transportation, ubiquitous shared responsibility for clean production and waste treatment techniques, ubiquitous home delivery, working from anywhere for any period of time, decentralised real time peer to peer banking, enhanced by benign algorithms and verified AI technology. The organic real and the synthetic hyper-real co-evolve naturally in the Another Normal, where simple rules create complexity, diversity, fairness, and equality. Choosing only those strong and simple rules that lead to diverse and complex outcomes. The Component, a Personal Odyssey towards the Another Normal has 10 chapters: 1] Here and now, 2] What have we done? 3] Another Normal, 4] Ubiquitous components, 5] Components versus elements, 6] The Component, 7] Where are we now?, 8] Proactive components, 9] Where do we go?, 10] The Chinese Patient. The Chinese Patient chapter suggests a set of 12 simple rules of law that are meant to form the framework for diversity, fairness, and justice in the built environment.
Although supple in its geometry, our work is not a form of biomimicry. In art, expressionism cleared the way to abstract art, which in its turn paved the way for concrete art. Concrete art is an art form that needs neither reference to organic nature nor to man-made artefacts. Concrete art is what it is, its meaning lies in the eyes of the beholder. Similarly, my architecture is what it is, incorporating the actual state of affairs with respect to culture and technology. Back in the late eighties, early nineties, visual artist Ilona Lénárd and I explored the alien by a design method we called Artificial Intuition, sketching without predefined ideas in digital weightless space. During the process of sketching one responds to what is evolving before one’s eyes, and afterwards one decides what meaning one could give to the sketch. There are a few parallels to how today Artificial Intelligence is used to create images, with one important difference: we do not draw from a database of existing 2D images, but create a 3D construct directly from our own brains through intuitive gestures. While Artificial Intelligence-generated images I consider a form of modern alchemy, our design method is synthetic in nature, leading to precise verifiable constructs. We are not depending on someone else’s biases in the selection of images, we are diving “idiot-savant-style” into a universe that is developed by ourselves, into our own biased visual and gestural repository. Artificial Intuition has proven to be the fertile basis for all of our work from then on, anticipating the building body and real time behaviour of the Saltwater Pavilion, which opened its gullwing “doors” in 1997.
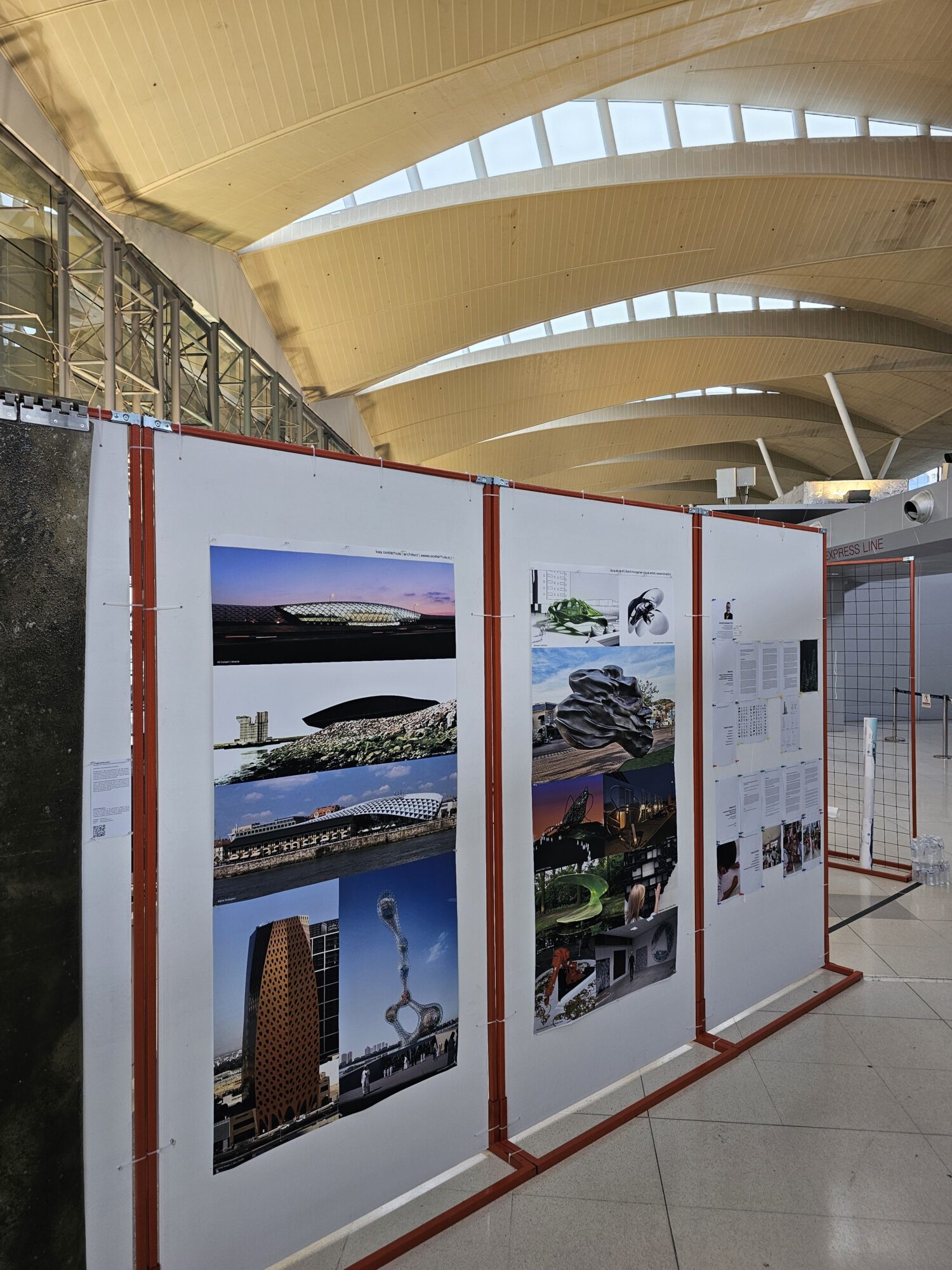
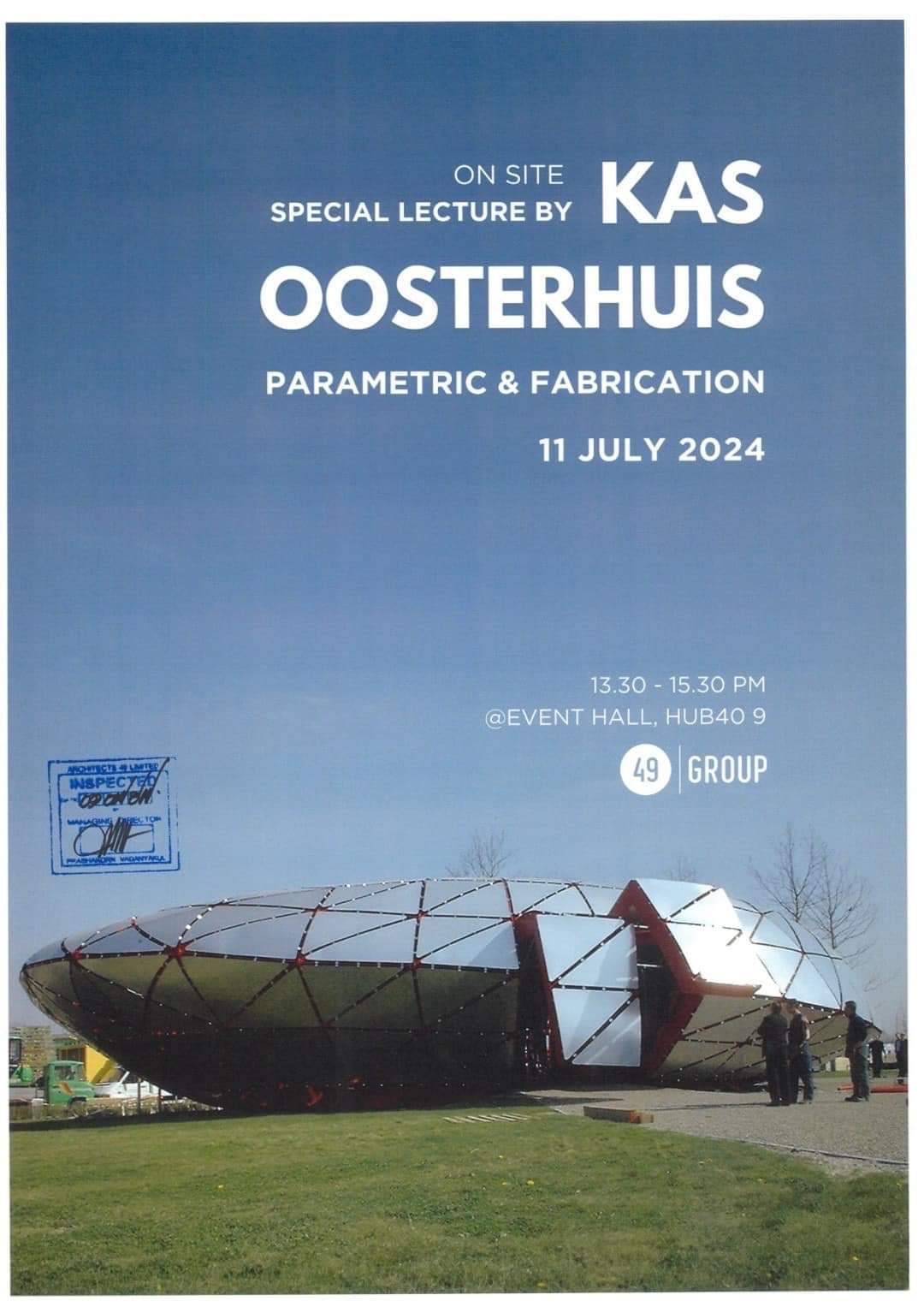
Working on Ilona’s Folded Volume, exhibited in the Synthetic Dimension exhibition in 1991, we discovered the crucial role of parametric design and component-based construction. The heavily cantilevering shape of Folded Volume is assembled from a dozen different components, irregular triangles, an irregular quadrangle, a pentagon and a hexagon, connected to their nearest neighbors following one and the same parametric detail. Our design adage “One Building, One Detail” was born. It lasted until 2001, designing and building the Web of North-Holland, to unleash the uncompromising design philosophy to the scale of architecture. In its appearance, the Web of North-Holland we consider both a work of art – that is when the gullwing doors are closed – and a piece of architecture – that is when the giant hinged sections of the skin open up to invite the public into the building. Neither the shape of Folded Volume, nor the shape of the Saltwater Pavilion, nor that of the Web of North-Holland, refers to anything in particular. These objects are what they are, which in an unfamiliar fashion makes them look alien. They look closed from the outside, yet regularly open up dramatically to reveal to the public their out of the ordinary interactive interior. Not surprisingly, our sculpture buildings are often seen as spaceships, which is a reference I would accept, since, just like spaceships, our projects are designed in weightless space, make precise contact with the local context and then adjust to that context before they make a successful landing. But I certainly would not accept the reference of the Bálna Budapest as a whale – “bálna” meaning “whale” in Hungarian. Our building was originally named the CET [Central European Time], which had the second meaning of “whale-like”. The general public quickly nicknamed the building the Whale, and that reference became so popular that the building was officially renamed into the Bálna. I never intended the building to look like anything in particular. The underlying design ideas are pure abstract [aka concrete] notions of 1] going with the flow, while the building is positioned along the banks of the Danube, and points in the direction of the flow, 2] cantilevering forward to new developments to the South of Budapest as to look forward into the future, 3] feature lines that come down to exactly one point, to visually fix the volume to the to the ground in the most minimal fashion, 4] merging facade and roof into a single envelope, while the outward-pulled back and the forward leaning front of the main volume function as protective canopies above the entrances, 5] absence of traditional indications of what is a door, a window, a floor, a base, a shaft or a capital, and 6] the integration of structure and skin into one coherent system. Yet, I often refer to my buildings as “body buildings”, not as a reference to organic bodies, but to the unibodies of cars and other forward moving vehicles. However, what organic animal bodies and synthetic vectorial bodies have in common is the symmetry along its longitudinal axis. Both animal bodies and our vectorial bodies want to go places, they want to go where no one has been before.
Parametric design is a design method to build dynamic relations between the constituent parts. Parametric design is not a style as advocates of “parametricism” want us to believe, and certainly not the dominant style of our times. Yet, building dynamic relations between the constituent components of a building, between buildings in the city fabric, and between the buildings and their users is bound to become the new normal. A parametrically orchestrated design can just as well be orthogonal as fluid. Parameters are defined as variable values in an equation. However, following the design paradigm of continuous variation, the visual outcome may well become fluid, as the components of the structure and the skin may gradually grow or diminish in size, gradually change shape, smoothly transform from convex to concave, or feature folding lines that fade in and fade out. Liquid architecture – as Marcos Novak coined the term back in 1991 – may be adopted by individual designers to mark their style. Parametric design supports such a liquid, fluid design approach, as it has supported all of our designs since we designed and realised the vectorial building named the waste transfer station Elhorst/Vloedbelt in the early nineties. But is not the proper label to put on liquid architecture. Neither would it be right to label our design attitude as computer architecture or digital architecture. One should not take the means and methods of design and production to describe the architecture. Similarly, I decline terms like robotic architecture and AI architecture. Such terms are at best short-lived superficial characterisations, but fail to describe what is the design concept of the designer. Paraphrasing Frank Stella: “What you see is what you see”; it is what it is, and its meaning is in the eyes of the beholder. Microsoft’s AI assistant Bing describes my architecture as follows: “Overall, Kas Oosterhuis’s architecture is known for its innovative designs that push the boundaries of traditional architecture. His designs often feature a combination of iconic architecture and functional layouts that are cost-effective”. Innovative architecture is an until then unexplored combination of design concepts and techniques. I am not interested in establishing a particular style, my interest is in innovating architecture from within, thus generating the unknown.
Kas Oosterhuis, April 2023
Three generic intros for “The Component” written by Writesonic AI.
1
“Kas Oosterhuis’ The Component, a Personal Odyssey towards Another Normal is a unique and inspiring journey of self-discovery. Oosterhuis takes us on a journey of exploration, reflection, and transformation as he traverses a world filled with obstacles and opportunities. Written from a highly personal perspective, The Component is an intimate exploration of identity, personal growth, and the power of self-reflection. Along the way, Oosterhuis shares his many joys and struggles, as he searches for a new normal. As he confronts his fears, doubts, and anxieties, Oosterhuis discovers his true self and develops a newfound sense of purpose. As readers, we are invited to join Oosterhuis on his journey to find his place in the world and discover the power of taking ownership of our lives. The Component is an inspiring and thought-provoking read that will leave readers feeling empowered and inspired to take control of their own journey.”
2
“Kas Oosterhuis’ “The Component: A Personal Odyssey Towards Another Normal” is an inspiring account of his journey from a life of conformity and discontent to a life of purpose and freedom. Oosterhuis was a successful architect who was stuck in the rat race of modern life, until he made the decision to break free and pursue a more meaningful path. In his book, he takes the reader on a journey of self-discovery and exploration, sharing his experiences, insights, and reflections on the world. He encourages readers to find their own path and embrace the power of being different. As Oosterhuis writes, “It is only through embracing our differences that we can truly be ourselves and live our lives to the fullest.” Through his inspiring story, Oosterhuis encourages readers to break away from the status quo and create their own unique paths in life.”
3
“Kas Oosterhuis’ book, The Component, is a personal odyssey towards another normal. In this powerful and moving narrative, Oosterhuis takes the reader on a journey of self-discovery, examining the power of resilience and the importance of self-care. Through Oosterhuis’s experience, readers gain insight into the struggles and triumphs of an individual who is determined to create a life of their own design. Oosterhuis’s words are both inspiring and humbling as they explore the themes of identity, courage, loss, and hope. The Component provides an opportunity to look at one’s own life and explore the possibilities that lie ahead. By examining the past and looking to the future, readers can take solace in the knowledge that our lives are not predetermined and that there is always hope for a brighter tomorrow.”

The Qatar story | Naash’s daughters and Suhail
Legend has it that Suhail killed Naash, who had seven daughters and were in grief after their father murder and swore not to bury their father’s corpse till they avenge his death. Suhail ran away eastern south. The girls decided to chase him, four of them carried their father’s coffin and the rest followed. They kept pursuing Suhail but they never found his trace and kept travelling for the rest of their lives. The daughters of Naash (Banat Naash) or what is known as Ursa Major is a constellation in the northern sky that shows up all year long, and they are still chasing Suhail who appears a few months of the year and disappears from sight for the rest.

The Seven Daughters | Scenario Qatar 2.0
The seven nodes of the The Seven Daughters sculpture are accessible to the public. The public navigates from node to node to experience today’s version of the parable of the Seven Daughters. The Seven Daughters sculpture reflects the story of Qatar reinventing itself into Qatar 2.0.
The triangulated skeleton has a synchronized white semi-transparent exterior skin and semi-transparent interior skin. Projections from the inside are visible as a massage of lights at the outside, best visible at night. The shadows of the triangulated structure between interior and exterior skin are visible as well when the projections are on.
The complete structure is based on one single [parametric] detail including the structure and the skin. Additional elements are the travellators, escalators and elevators, and the [floating] visitor platforms in each node at the inside. Finite element calculations define the itchiness of the individual members of the structural diagrid mesh, stronger in the lower regions, slimmer in the higher regions.


iA#1 | iA#2 | iA#3 |iA#4 | iA#5

We Robot[s]
I robot is the title of the science fiction collection of novels by Isaac Asimov, published in 1958. This is more than 60 years ago, and first recently a serious discussion on robotics has reached the international architectural discourse arena. As always, architecture is slow to pick up new paradigms. What exactly is the importance of robotic architecture? How does robotic architecture affect the art and science of building? To what extent is today’s robotics different from robotics of 60 years ago?
For today’s purposes we must replace the ‘I’ by the ‘We’. We no longer consider robots as isolated replica’s of human beings, but as members of a complex swarm, a swarm of cooperating robots. It would be even more accurate to define today’s robots as members of a swarm of the same species, interacting with many other robots of different species, including human beings and things. Things include a range of industrial products with augmented intelligence Like cell phones, furniture, building components, cars, while robots are actors in the Internet of Things. Robots are not alone, like we humans are not alone. We humans
cannot function in an isolated fashion; we exist thanks to the connectivity of our brain to other brains. They are simply different players of the same system, but cannot be seen isolated from that system. A single brain cannot exist without a multitude of other brains. Similarly, I think about robots: A single robot does not make sense; robots must be seen as actors interacting and communicating with other
actors.

Robotic swarm design
We consider working with bots in the design process, in the fabrication process, in the assembly process, in the operation of the building, and in the recycling of the building. In this issue iA#5 we focus on the first two stages of design and fabrication, and I will add a few speculations here on robotic assembly and maintenance. How do we work with robots in the design process? Let me assume that your laptop is basically a robot, and that this robot is most likely connected to the Internet or otherwise to other laptops. Also your smartphone is considered a robotic device. Even you may be considered a robotic entity since you are connected to other bodies with brains in real time. But pot everything is robotic as of yet in daily reality, most building components are not robotic, since They do not process any information not before, not during and not after they have been constructed.

Three-phase rocket
The whole enterprise at Hyperbody is based on the following intriguing idea: All building components must in principle be considered as information processing devices, as actors, in other words as some particular species of robots. Designing with robots means designing in such a way that everything that is considered part of the design will be considered as potentially robotic, including the designer. Robotic is the
default state, in case the actor is deaf, dumb and blind, this will be seen as an exception to the robotic state of each individual component. The tools that are used for robotic design are the nowadays available computing hardware and software, the innovative aspect is the intention to design from within the new paradigm of robotic swarm architecture. Thus while in daily life only a fraction of the material that surrounds us behaves robotically, in the robotic swarm design process literally every thing and every one is considered a robotic actor, interacting a streaming parametric fashion with other robotic components. It is as if you are like a three-phase rocket:
1. Parametric design. In parametric design all building components are related to their immediate neighbors and to other parameters driving their shape. Parametric design is a mandatory condition for complex geometry.
2. Interactive design. In interactive design some components can change shape and content in response to external streaming data. Prerequisite for interaction design are a variety of sensors embedded in the immediate environment that sends information to the design process.
3. Robotic design. In robotic swarm design virtually all components, both of the design subject and of the design team, are active actors that are reading, processing and transmitting data all the time to their immediate neighbors and to anyone and anything that may pick up the waves and has learned how to feed on the streaming data. A typical robotic swarm design process supports the integration of design agents, producing streaming data that feeds the evolving development of the design. Needless to say that to reach the default state of a full-blown robotic swarm design process there are still some years ahead of us, as we
are making the first exploratory steps, but are confident that Hyperbody’s robotic research agenda may reach its goal within a couple of years.

Robotic swarm fabrication
Hyperbody has set as one of the goals to produce prototypes according to the file to factory process on the full 1:1 building scale. I reject the production of scale models, since they give an inaccurate picture of reality, Just like the BIM is by definition 1:1 scale, also the output must be 1:1. That is the only way to build up knowledge and prepare for the non-standard praxis. The step from CNC machines for laser cutting to generic robots is an important step that a few companies and research units worldwide already have undertaken. Hyperbody took a first step in the robotic swarm fabrication process by acquiring two large ABB robots from the automotive industry, and started experiments with robotic
fabrication. The generic robot can be customized to perform specific tasks, only by changing the operating tool and the program in order to explore the potential of that specific tool. We have concluded before that we have to design the tools in the design phase, now we have found that we need to design the fabrication tools as well. The design tools and the fabrication tools can be very well project specific. Each project that has sufficient substance justifies the design of its own specific design tools and fabrication tools. Think of a swarm of customized production robots in the factory, most likely mobile robots in the on-site factory in order to reduce ineffective handling, and produce many of the basic interlocking building components, specified for their individual tasks.

Robotic swarm assembly
One needs to think robotic in the fabrication process in order to develop the logical next phase in the erection of a building, which is the subsequent robotic building assembly process. The most promising concept is to bring the robots on-site, and let them produce and assemble the tagged building components. For that we cannot limit ourselves to one or two super smart robots, but we need to think in an army of relatively simple robots that work together and collectively perform the required tasks. Simple robots that fulfill simple tasks, while a multitude of them build up swarm intelligence. Robots can take over tasks that are too risky for humans to do. They can climb the structure like spiders, they can fix the bolts high up in the air, and they can do that without having to build up scaffolding or other safety measures one needs to take to protect humans. Imagine one robot brings building components in place and another robot of another robot family is bolting the components together. And then imagine many of those robot species smoothly cooperating. Also keep in mind that their jobs need not be repetitive, while taking real advantage of their capabilities when they pick up and fix customized unique components. The robot needs to be
instructed to use proper parameters as extracted from the building information model.
Robotic swarm maintenance
Finally, a few words on robotic maintenance: Many of you know of the robotic lawnmower machines or the robotic vacuum cleaners that respectively populate lawns and homes. But let us think ahead, imagine an army of hundreds of façade cleaning robots, walking the three-dimensional façade like gekkos, cleaning small areas at a time, regularly returning to their base stations to get a water or soap refill, and sprawling out again over the façade. Such façades would be continuously populated with hundreds of small cooperating robotic devices. Imagine human cleaning staff to cooperate with this army of cleaning robots as to monitor the façade structure, and as to report on small failures that needs to be mended. The robotic devices are instructed to follow the BIM, and in case of any small deviation they would immediately record the conflict between the actual state and the designed, desirable state. Fantasy? Fantasy like the three-legged smooth
running spiders from Minority Report that are checking the eyes of the inhabitants in their search for the suspect Tom Cruise alias John Stanterton? No, not a fantasy at all, but rather a relevant technology required for the mandatory maintenance and inspection of tall building façades, for instance. Swarms of robots, invading both exterior and
interior territories, operating in an interactive cooperation with educated human staff, would in the end strongly reduce maintenance and subsequently failure costs leading to a higher safety level.
Human robot interaction
An urgent question that needs to be discussed here is what would a widespread application of swarm robotics in the building industry mean to human labor. We want everyone op to have a decent job after all, we want everyone to do relevant work and we do not wish to see many workers in the building industry unemployed. I became aware of this
urgency when lecturing in China and discussing with Chinese architects in August 2011, After ample consideration I believe that the solution is in the early design concept. I believe we should not refrain from advanced technical solutions like swarm robotics, but at the same time we should not automate and standardize to the extreme, but design the automation process in such a way that humans find pleasure in meaningfully interacting with the robots. Robot hands and human hands should work. together in a smooth operation that guarantees the continuity of meaningful human labor and effective robotic operation at the same time. Do not attempt to optimize a traditional building design and building processes with human robotic processes, but take advantage of their potential and create a new surprising complexity based on simple rules in such a cooperative human-robotic fashion that one is able to create a new kind of non-standard architecture that otherwise would not have been possible. That is the only justification to choose the “we robots’ road towards future building.
