director ONL | emeritus professor Hyperbody TU Delft [2000-2016] | professor Qatar University [2017-2019] | consultant Qatar Robotic Printing Qatar University [2019-2022] | email oosterhuis@oosterhuis.nl
My attention was triggered when reading on Facebook a discussion between Archis / Volume critic Arjen Oosterman and Geert Bekaert Prize winner Mark Minkjan. The discussion circled around the value and misleading tendencies of architectural rendering, taking a MVRDV project as an example. Although I sympathize with Arjen Oosterman, who rightfully was blaming Minkjan for an easy twist of populism, my immediate professional reflex was: why not discussing the meaning of the design itself instead? The architectural discourse should in my opinion address the inspirations, intentions and possible implications of the actually proposed design as to be able to discuss in public the impact on the design practice. Therefore, to put the money where the mouth is, here are my observations of the very design itself, interlaced with some explicit opinions.
Real science fiction
Knowing the MVRDV lead designers – Jacob van Rijs en Nathalie de Vries invited me to be their design tutor – I wish to take their design intentions seriously. I am familiar with their original fascinations for bold design concepts, very much encouraged by myself back then in the early nineties, and I have seen how they were subsequently influenced by OMA’s hyperbolic turbo language and lightweight cynism. The Ravel Plaza design stands for something I think is worthwhile reflecting upon, however not for the reasons Mark Minkjan was awarded his prize for.
When looking at the design I am not shocked by the abundance of greenery on the balconies, neither on an assumed absence of balustrades, but I am not so much shocked as well as straightforwardly disagreeing with a design intention that destructs, collapses, erodes and explodes. I simply can not raise empathy with the act of eating away bits and pieces of a World Trade style tower. Instead of developing an original concept for a residential tower with lush balconies, which would be an absolute important thing to do, they chose to erode something they criticize as to define their design goal. Therewith the design intent becomes a built form of critique of something they do not want. But, if one doesn’t not want it, why taking that as a starting point at all? Just to to tell a story? But what story? Looking at the design, I see a resemblance with the crash of the World Trade towers. Why taking a disaster – whether an unconsciously or consciously made design decision – as the inspiration for the visual effect? Having watched many sci-fi movies and having seen the twin towers coming down as a real form of science fiction, I realize that the visual impact of the image of destruction can be so strong that it somehow burns into the designer’s mind. Somehow there is no escape from it, at least not when takes a straightforward tower design as the starting point for the storytelling. My critique on MVRDV’s design is that it confirms a destructive Hollywood driven self-fulfilling prophecy rather than offering an alternative tio it.
Erosion and explosion
As to indicate that the Ravel Plaza design concept is not an isolated incident, I refer to other recent designs featuring similar gnawing characteristics. OMA’s Asian spin-off Ole Scheeren [OS] has designed an evocative MahaNakhon tower in Bangkok, Thailand, indeed evoking the erosion of a once-has-been straightforward tower design. Needless to say that it evokes much more emotion than the simple rectangular tower would have been able to produce, but that is not the point. The point is what sort of emotion Scheeren – using the power of the proposal – has chosen to trigger. He chose to snag modernism, which I consider as a form of violation, meaning that first he needs something he is critical of to violate, and only then be able to then tell his story of erosion and destruction.
The extreme version of erosion is explosion, which is the design story line MVRDV has chosen when designing their Cloud tower in Seoul. An exploded mid section, spitting out the low resolution voxels into all directions, strongly reminiscent of the effect of the violent Ground Zero impact. Although Winy Maas denies that there is such direct relation, it is obvious that the image of violent destruction has captured the designer’s mind, and that he unconsciously can not do otherwise than express the sign of times in this way. My own scheme of things tells me that the design for a skyscraper should come from the internal logic of the design to production process itself, rather than wrapping an otherwise traditional tower with a cosmetic intervention based on lighthearted storytelling. In my worldview a good design will express itself, instead of being an illustration to a story.
Poisonous combination of erosion and voxelisation
What troubles me particularly is the poisonous combination of the erosive approach to design with the aesthetics of voxelisation. Both the designs of MVRDV, OMA, OS and BIG share the same fascination for what is often referred to as pixelation, which is in effect is voxelisation in a very low resolution. Not surprisingly the Why Factory led by Winy Maas asks their students to build towers using white lego blocks. These lego towers are built up using structural voxels. In contrast, my own scheme of things is based on high resolution complex geometry combined with a strong internal structural logic, a well balanced marriage between top-down and bottom-up approach. Now what is popular among OMA and their spin-offs MVRDV, OS, BIG and many more – while these successful offices jointly have been dominatoing the architectural discourse for decades – stands almost opposite to what I stand for. The road I have taken, together with many of my peers of the Transarchitectures movement formed end of nineties by Marcos Novak and Odile Fillion and the participants of the earliest Archilab Conferences, headed by Marie-Ange Brayer, Zeynep Mennan and Frédéric Migayrou, who is now Head of Architecture at the Bartlett in London, is the interlacing of digital technology with architectural theory and practice. It is instrumental to note that these truly new fundamental developments were completely ignored by Rem Koolhaas in his 2014 “Fundamentals” Venice Biennale. His timeline of – in his view – relevant movements in architectural theory ended when he left the AA, that is end of eighties. Everything that happened after that was not included nor respected, neither in the selected “fundamentals” in that particularly retro-active Biennale. my base point of critique that the selected subjects like stairs, walls, ceilings, balconies etc are derivates rather than fundamentals. He intentionally missed the point by completely ignoring the richness and beauty of dynamic adaptive systems and complexity, which fields of research and practice – ONL’s LIWA tower serves as a representative of applied complex adaptive systems cq associative information modeling – are dealing with fundamental issues in architectural theory, understanding and working with the actual state of digital technology.
LIWA tower | Abu Dhabi | design by ONL / Kas Oosterhuis | 2014
In conclusion, I consider voxelisation for design concepts on the grand scale of architecture as a deceivingly reductive simplification of building technology, counterproductive to present advancements in architectural theory and practice. The combination of sympathy with destruction and erosion with voxelisation is outright alarming for its uncanny parallels to populism in politics using hyperbolic forms of expression in combination with simplified language.
My notes by page number reading The Inevitable by Kevin Kelly
9 becoming
10 continuous updates
13 protopia
18 ted nelson: hypertext 1984, intertwingularity, transclusion
19 hyperlinks enabled sharing
21 the web merged in physical world
21 anticipate intentions
27 2050: AI in everything
30 cognifying by distributed intelligence
33 AI enlivens inert objects
34 tools first were electrified, now are cognified
38 AI breakthrough unleashed by 1) neural networks 2) big data 3) smart algorithms
48 our human job is to create alien intelligence
50 robots are inevitable
53 cheap robotic production favors local production to cut transportation costs
62 the flow of copies is inevitable
64 from batches to daily to real time
65 nouns become verbs
65 flows, tags, clouds
66 everything yhat can be copied will be free
68 72 immediacy personalization interpretation authenticity accessibility embodiment patronage discoverability
76 as music streams it expands, as design streams it will expand and become abundant
83 the soft will trump the hard, knowledge will rule atoms
89 screening = reading + watching
93 ebook connects readers, authors, characters, ideas, facts, notions and stories
93 books are byproducts of the booking process
102 all linked words and texts form the umiversal book
104 screening nurtures thinking and acting in real time
110 accessibility replaces ownership
111 software eats everything
112 services disencourage ownership
113 alvin toffler: 1980 prosumer, consumer acts as producer
113 product becomes service
115 matching pros with joes
116 crowdspring bid with a design
117 a connected crowd of amateurs can be as good a the average solo professional
124 firms, marketplaces, platforms
125 platforms are factories for services
125 services favor access over ownership
125 the cloud is almost organic healing
127 where does the I end and the cloud start?
128 the cloud is the Backup
133 without ownership one is free to move like the hunter gatherer
144 increased sharing is inevitable
154 decentralised connected dumbs things can become smarter than we think
156 millions of niche markets
156 crowdfunding funds the creative niche markets
160 can a crowd make a car? 150.000 car fanatics designed 3d printed electric car for Local Motors
162 micropayments, electronic voting
164 we share the process not just the end product
164 share not only success but also failure
174 my avatar is managed by Universal You
176 information consumes attention
207 we will record everything, creating a new culture where everyone’s past is recallable (total recall)
215 cellphones saved VR immersion
217 presence in VR is the basis for interactivity
217 interactivity spreads out to the rest of the tech world
223 if something is not interactive it is broken
226 more sensors more intimacy more immersion: technology becomes a second skin
235 your body is your password
236 our interactions will become our password
232 buildings will be reskinned with altermative facades inside VR
232 the city will look different each time you walk through it
230 my quantifiable self
241 a quantifiable-self experiment is n=1
257 information is epandong faster than anything else
259 bits want to duplicate, replicate, be linked
260 david brin: the tranparant society 1999
260 civilising coveillance
262 vanity trumps privacy
264 tera peta exa zetta yotta bytes
265 bits can be arranged into complicated structures just as atoms are arranged into molecules
266 by raising the level of complexity we elevate bits from data to information to knwlowledge
266 bits want to be linked
266 unbundling allows the elements to be rearranged into a new chemistry
268 machine readable information
271 can wikipedia be mapped to political governance
271 radical embrace of the common wealth
273 technium is the modern system of culture and technology
277 the improbable is the new normal
278 mass media make people ready to try something extraordinary
279 because of global connectivity all facts have their antifacts challenging the truth and reality
280 superlatives and extremes are the new normal
279 certainty about anything has decreased
279 requires constant questioning, leaping into scenarios, provisional beliefs, subjective hunches
280 roaming the web is like tapping into our collective unconsiousness like dreams
284 knowledge is expanding exponentionally, questions are expanding exponentionally faster
284 science is a method that chiefly expands our ignorance rather than our knowledge
289 a good question is the seed of innovation
289 questioning is more powerful than answering
296 we can’t live without what we’ve made
297 the beginning is just beginning
The title of this blog leaves no doubt. I am not a fan of parametricism, while everything we do at my innovation studio ONL and at my chair Hyperbody at the TU Delft is fundamentally parametric. I will explain why. I do not think that it is a matter of definitions, but a matter of understanding of what parametric design is about. It certainly is not a style, and it should never be seen as such. In his lecture at the symposium Artificial Intuition [1990] of which I managed the content at the Faculty of Architecture at the TU Delft Robert Aish told us that parametric design was something he was doing already back in the seventies while working for a Polish shipbuilder. Since a ship does not have a repetitive section through its body due to the streamline of the ship he developed a detail of which the values would adapt to their changing position in the body. That is parametric indeed, although Aish had a better word for it, he named it Associative Modelling. Parametric design means modelling associations between the components, which a ship or a building is made of. Associations are a form of dynamic entanglement. When one part changes its values, the associated parts change with it.
Bidirectional relationship
Since the early nineties my short definition of parametric design is the art of establishing dynamic relationships. Adaptive relationships of parts to parts, of things to things, of objects to objects, whether in the virtual realm or in the materialized world. Related to parametric design, but not the same, is interactive architecture, which I define as the real time relationships of people to things, and the other way round. Relationships are per definition bidirectional and never static. Relationships are constructed by acting in a complex adaptive system. Such is the case with parametric design, a parametric relationship acts both ways and in multiple ways.
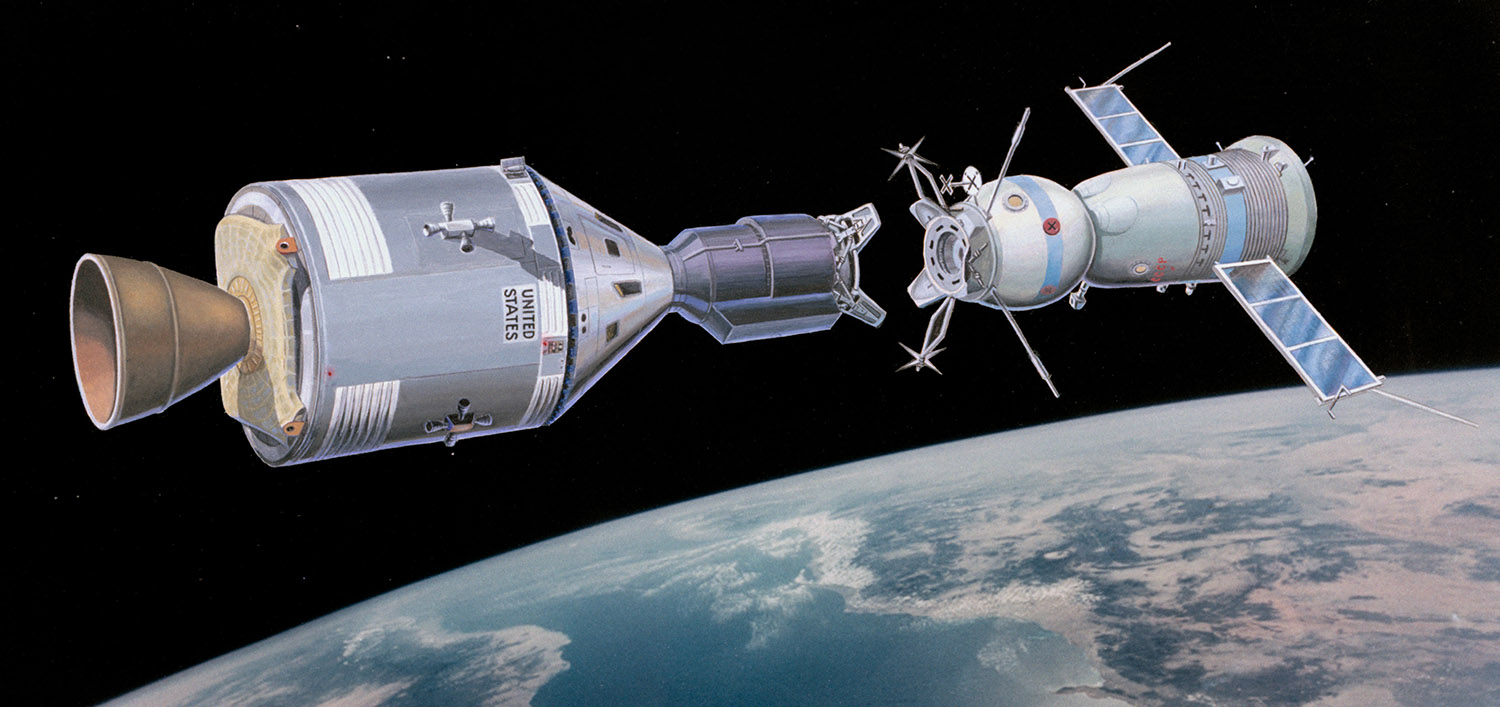
apollo soyuz connection | 1975
Apollo < > Soyuz
An associative relationship does not necessarily mean that the neighboring part is similar in its shape or dimensions. Entangled parts can be of a different family and of a different order. I can illustrate this with my favourite yet one-dimensional form of a parametric relationship, which is the relation between the Soviet Soyuz and the American Apollo capsules docking in space. This happened back in the seventies of last century and it was a huge accomplishment, and of high political and technical importance. American and Russians embarked on a shared process of exchanging visions, views and data, eventually leading to the agreement on one single common docking ring. It basically meant that the Soyuz and the Apollo fitted exactly, in one moment in time, at one specific location, with one specific set of shapes and dimensions. It is this exactness of the association that is key to parametric design. In the world of parametric design one establishes exact relationships between parts, entangled as to adapt to the variations of the neighboring part.
ruling curves | waterpavilion | ONL 1997
Waterpavilion
While designing the Waterpavilion [ONL, 1997] we linked the reference points on the main 8 curves, define the geometry of the sculpture building, to the reference points of the steel structure, to the skin and the continuous variable fins gradually emerging out of the main body to emphasize the curvature. Structure, skin and featured fins were linked into one coherent parametric system. Associatively linked since in each instance on the curve the relative values of their mutual distances and angles would change with their positions along the curve. These relationships were not modeled in a existing CAD program but scripted from scratch using Autolisp routines. Drawings and 3d models are meaningless in a dynamic parametric world. The associations are defined with formulas and algorithms, describing their mutual relationships. Scripting is a very lean method of design, consuming very little data, exported to and retrieved from a database.
Patricism
What is often considered as a parametric design is mostly nothing more than a fashionable form of tessellation of the surface, covering only a literally superficial part of the design / building. The real power of parametric design is to link all constituting components to each other, including floor, wall, roof such that when And staying within the limitations of such a mono-culture of similar yet not the same parts, one could indeed speak of a style, largely subject to fashion and voluntary follower of built-in commands of certain design software. Yet it would be unjust to the full potential of parametric design to declare the superficial qualities of being similar yet not the same a mainstream design movement, whether or not labelled as parametricism. To do that is a populist act, not respecting what are the underlying values. I remember having stated in my letter to Alvin Boyarsky describing my vision as unit master at the Architectural Association [AA] in London [1988-1989], that I reject all -isms. Then my rebellion was against modernism and its counterpart post-modernism, constructivism and its counterpart de-constructivism, both of which were deeply adhered to at that time at the AA. But I wanted no more -isms. So it may not be surprising that I became allergic to the term parametricism, which is nothing more than an attempt of Patrick Schumacher to become the founder and leader of a populist movement, feeding upon the supramatist sometimes bigoted calligrahic sweeps by the late Zaha Hadid [read my blog Calligraphic Sweeps]. His attempt to establish a mainstream movement would be more appropriately labeled patricism, more than anything else.
While modernism is an attitude which attempts to look modern, yet in its essence is not modern but retro-actively looking like something modern, and constructivism is an attempt to look like a logical structure but in fact isn’t, the container term parametricism is fit for designs that look parametric but not necessarily are parametric. I feel that it is important to make the distinction. For example the Reiser Umemoto Swiss Cheese tower in Business Bay in Dubai [2014] may be considered parametric, while it is not parametric at all. Yes, it features 5 different sizes of openings in the concrete exoskeleton in a seemingly random fashion, but that is exactly why it is not parametric. In a parametric design all openings would have been unique in their shape, any sameness would be a pure co-incidence. at the other end however, ONL’s LIWA tower is by and large parametric, linking the curved geometry drivers to the Gross Floor Area [GFA] calculations, to the steel structure and to the skin in one coherent relational system. All windows of the LIWA tower are unique in shape and dimensions, all structural X-crosses are unique in shape and dimension, and both systems are parametrically linked to each other. Changing the position of one reference point on the curve changes all windows and steel components on at least two ruled surfaces of the body wrap, while maintaining the set value for the GFA.
Genetic structure
Parametric design systems must and can be developed further, until the point that all constituting components have become an acting part of the system. Building components are seen as actors in a dynamic and open relational design system. The design that comes close to this point is ONL’s BYYU Body Chair, where all bits and pieces are associated part in one coherent complex adaptive system, where at the front end the customer can set individual preferences, while at the back end the design is directly linked to the data driven robotic waterjet-cut production of the pieces. Only when having a fully functional parametric design system one can establish such direct link from design to production, from customer to end-user, which explains the relevance of treating parametric design systems not as something it looks like, but as something what it is deep down in its genetic structure.
Body Chair | design Kas Oosterhuis | Dutch Design Week 2016
The Body Chair is a radically parameterized design for a family of Made to Measure comfortable lounge chairs. The Body Chair consists of 28 pairs of 56 triangular base components, parametrically designed as to allow for endless geometric variations. The revolutionary asset of the Body Chair is that all constituting components such as the legs, the seating and the back, are all members of one and the same design system, based on one parametric detail.
Body Chair detail | design Kas Oosterhuis | 2016
This user centric Make Your Own shaping process is driven by the web based application at www.byyu.eu, allowing the customers to shape their own personal chair. The customers become co-creators shaping their personal geometry of their personalized chair. From the web based app to the production of the 28 components the design to production process is fully automated.
go towww.byyu.eu and shape the chair that suits you
The linear one-dimensional movement along the highway is broadened to the second dimension when turning off or filtering in · Driving along at a regular speed one feels the line-movement, the movement intersecting the landscape and zipping it open · The car and its driver are the point that is multiplied one dimensional to form a route · While overtaking and turning off, one moves away from the straight line movement for a second, the first dimension is being stretched to the second dimension, for a moment the line is granted the sensation of the plane
Dimensional sensation
When the road rises (on a dike for instance) or even more clearly when the road crosses a road below by means of a bridge construction, then the sensation becomes three dimensional · By moving sideways and upwards one feels the elasticity of space: the traffic junction with its fly overs · The three dimensional sensation is created by movement, by the system of roads and bridges, slip roads and exits · The monotony of the straight line is as essential as the fact that it may be widened (and become a plane) or deepened / heightened (and be turned into space) · The moving particle, the car, stretches dimensions and is even able to interweave them at certain points · In a joint venture with the cars the road system represents the elasticity of space · The details designed by the Department of Public Works add to the overall picture · As far as design is concerned items like barriers, white lines, graphics, dikes, the long rows of lights, all fit in very well · The disarmingly effective way in which the barrier rises from the asphalt or grass, is excellent in its simplicity · The broad white lines which divert at the exits and meet again at the slip roads guide along the continuous stream of driving, small, streamlined containers
Messengers
The boxes on wheels seem to be mesmerized by the point perspective they have to reach · Apart from some dissidents, they feel the inward need to move along the road, faithfully keeping between the long white lines or the dotted lines, all of them with a different speed · The driver gets in his car at one of the innumerable ends of the many-branched road system, he takes part in the system, to wander away again to one of those numerous ends, to his temporary destination · The car and/or its driver are the messengers, linking point of departure and point of arrival · In between there is the road system, an open network, available to anyone who owns some means of transportation, knows the rules and wishes to conform to them · The road system and the car literally belong to the same system · Without cars there would be no smooth asphalt roads, without roads cars cannot function · Ecologically speaking they belong to the same organism
Voluntary prisoner
It is difficult to determine whether the driver decides for himself where he wants to go or has become part of a mechanism following its own laws · When the driver gets in his car and enters the system, he becomes its voluntary prisoner · During his journey he contributes to the preservation of the system, but his place is interchangeable: his place may be taken by anyone else · The driver has swapped his individuality for a collective contribution to the further development and complication of the physical communication system · More and more energy is being dissolved for the further evolution of the road system as a building · Each individual contribution adds to the total amount of energy condensing in the communication network, each contribution adds to the intensity of the earth encompassing movements
Pump up the volume
The original surface of the earth is being transformed in a continuous acceleration into an artificial landscape with artificial objects and events, linked by the visible communication cords · The compact energy of the fuel and ores is set free and rearranged into much lighter, airier volumes · When compressed, the basic material of a car takes up no more space than a small cube of 40 x 40 x 40 cm3 · To turn this cube into an industrial object, the chemical structure of the various basic materials is purified and turned into a plate-like or fluid half-product · Then it is spatially transformed into hundreds of parts which are assembled according to a particular pattern and turned into a complex artificial organism · The volume of the car is increased more than a hundredfold compared to the total volume of the compact basic materials · The simultaneous explosion of space (pump up the volume) and implosion of knowledge, laid down in the form of a car, represents the elasticity of constructional space · This process seems to be characteristic of products of our culture: do more with less material
Informed by the speed of light
Yet at the same time: the more effective the use of material, the more energy it takes to reach such levels of effectively · The ability to move fast, and some simple inventions, have had a snowball effect on daily life, from sport to transport · And from physical transport to electronic transport · Nowadays we are informed with the speed of light (radio, TV, computer), the time that is needed to transfer information has been reduced to practically nil · We transmit and receive almost simultaneously · We cannot observe the transportation of this instant communication with our senses · Although the atmosphere is being riddled with a permanent, seemingly structure-less network of all sorts of radiation, we cannot observe this presence · Had our sight been turned in to a different wavelength, even then it would be impossible to detect any structure because of the jumble of waves
Reducing the drag
Inspired by the speed of electronic communication, we have felt the need to move faster ourselves, to take a seat in a mechanical device (train, car, plane), which compresses the length of the journey · Sport, in origin a means to spend one’s leisure time, becomes a speed race · New sports are being invented, based on the elements of speed and streamline · The demand for speed becomes a compelling factor in the design of objects which may move · Science and design are closely linked · Moving objects face a certain amount of drag from the matter surrounding them: air, water, ice or asphalt · More and more effective designs are invented to reduce the drag in these objects pulling themselves along · It is evidently a matter of the utmost importance to perfect the form, thus reducing the drag · The streamlined form uses less fuel, leads to better performance, is in short economically more effective
Irresistible dynamic
All the new theories from aerodynamics and aqua-dynamics, together with the professionalization of leisure activities, have yielded the evidently communicative objects but also a number of fascinating new sports: windsurfing, hang-gliding, throwing frisbees, skateboarding · Existing sports like ballooning, flying kites, skiing, cycle-racing, sailing and speed-skating are being subjected to an aerodynamic metamorphosis, as a result of new theories about drag and transfer techniques and as a result of the availability of new materials, generally developed in space travel odes with their high-standard materials · Technology is facing the challenge of further reducing weight and drag and improving performance · The new shapes of the new and renewed sports are inviting: even when these objects do not move they carry an aura of irresistible dynamic · The surfboards, the ski-boots, the frisbees, the skateboards, they are the equipment of a new way of life: leisure activities have been professionalized, leisure time has become a profession
Streamline
The new professionals surround themselves with bright colors and fresh air, they are constantly moving on, under or in their streamlined fetish · They are the new nomads, the exempted who have released themselves from labor ethics and the principle of usefulness · They are not only the consumers of these attractive new objects, they are also their provokers · Because of their lifestyle, developing these new objects has become a serious and flourishing industry, into which science, technology, stylizing design and professional pleasure have been combined quite naturally · The streamline is halted, the movement is caught in the slender, tense volume · When at rest, the surfboard seems to be a bit unbalanced, but it seems eager to move · The object has a built-in tension, which is only released when it moves full speed ahead in the water, when it may use its streamline to the full · In the exuberant trial of strength between the concentrated energy of the streamlined object and the drag of the water, the surfboard seems to relax, it seems to feel perfectly at ease, like a fish in the water
The stylist
When at rest the Citroën CX is like a tense bow and arrow, which need no longer control its subdued energy when it is ‘shot’ along the road, its elastic form showing out well in just o matter of seconds · The CX designer has tried to capture the caged tension of the formal concept in every little detail · The tension which keeps the arrow to the string of the bow has been caught in the design of the muscled sides of the car · The roof line is as tense as a bent steel spring · The back-window has been made concave to accentuate the curvature of the roof line · The nose has been pushed forward very far and has been pointed, to add to the tension in the bow · The stylist has abraded the frontal volume near the headlights, thus anticipating on the erosion which speed will cause · The sidelines, the folding lines in the tinplate, seem to have been drawn apart · The stylist makes the two loose ends of the line meet again in the undefined middle area of the side in a sort of whirling movement · In the formal concept the volume is taken as a whole, not interrupted by details · Our attention is not drawn to the various parts of the car (headlights, doors, windows), it is the object as a whole which calls up the image · The stylist uses quantitative data from technology (cx value), sound of the wind, comfort) to add to the subjective and individually-intuitive formal concept · Intuition and science are combined to increase the expressive qualities of the object · The stylized volume is measurably effective, the inherent tension visibly active
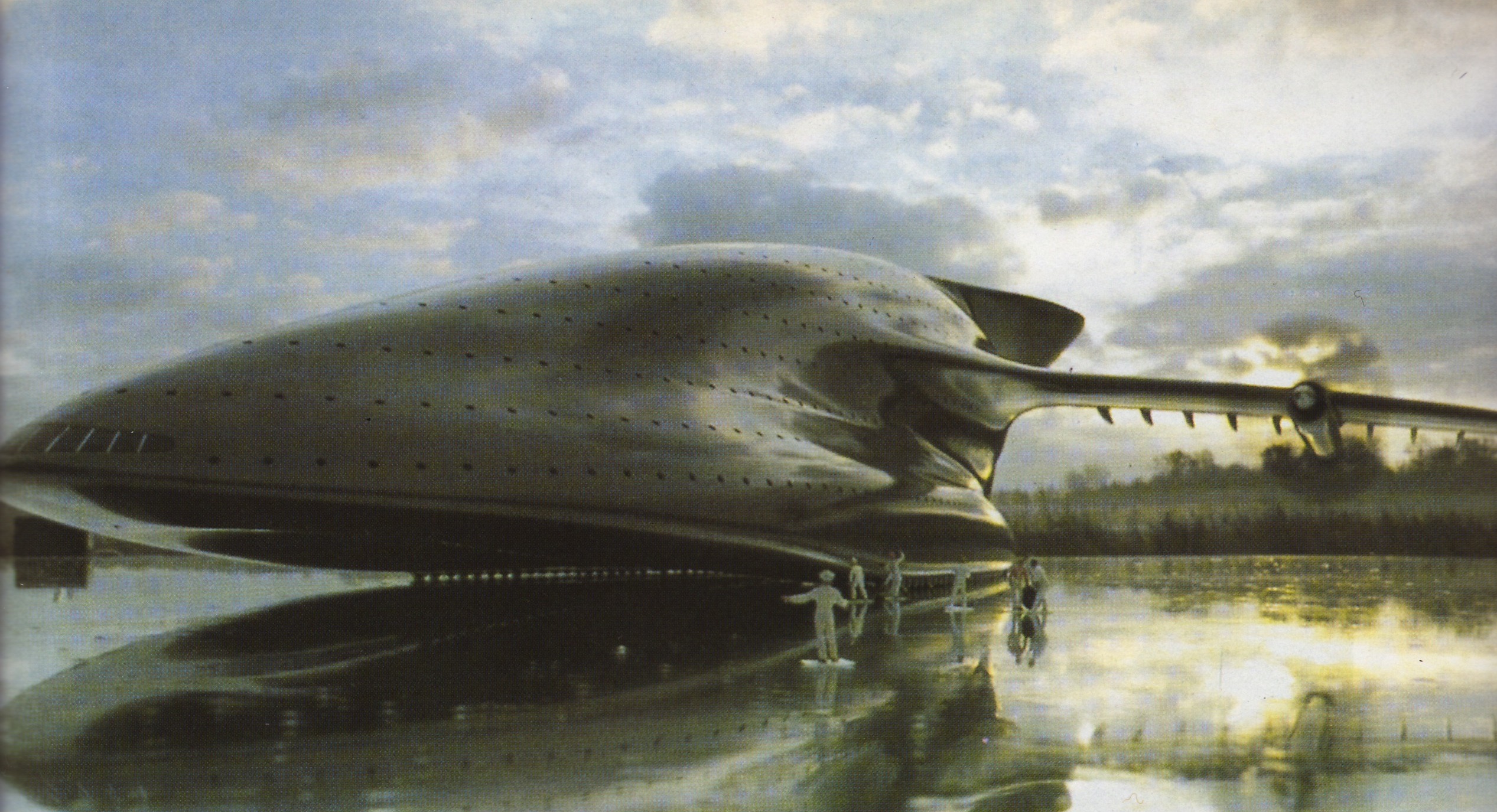
Built-in tension
The revolutionary proposals of Luigi Colani for a large transport plane calls for a shift to a different scale level, the volume has been increased with a factor of one thousand compared to the car · The science of air-traffic provides the designer with other data influencing the form of the object · There is more formal freedom, driving a car imposes far more formal restrictions · The volume of the car is like a stylized cockpit with engine, the large transport airplane is more like a flying container of enormous size, in which the ergonomics of the cockpit hardly influences the form as a whole · Fascinating about Colani’s design is the fact that he designs the giant object (which has the size of a building) as a single volume, without any additions · The form integrates the landing-gear, the separate parts merge very smoothly · Only the counter-rotating propellers are still clearly recognizable as separate elements · The volume rather looks like a streamlined potato, it does not remind one of an airplane at all · The movement-factor has made the stylist provide the volume with a built-in tension · When it is moving, it sets the external forces in motion, it intersects the mass of the atmosphere
Continuous surface
The streamlined container increases its internal tension at the expense of the external tension · The smaller the drag, the external forces working on the surface of the volume, the stronger the designer’s wish to increase the internal tension of the object, as if to maintain the difference in potential between the two · The technician aims at drag reduction, the stylist aims at giving maximum expression to his individual styling · A non-streamlined volume would only be confronted with external tension, bombarding the square volume with its airy matter · The volume has to defend itself and has to gather all its material to withstand the attack · The stream-lined volume, however, has anticipated the attack by building up an internal tension, equal to the external tension to be caused by its speed · As a certain amount of tension between dimensions pervades the road-system, so the tension between the non-moving environment and the moving object might be seen as the tension between volume and time, between third and fourth dimension · The tension between space and time is increased in the object at rest when the forthcoming movement is anticipated on · The volume is stretched in time · The object anticipates in time, time becomes part of the design · The stylized volume does not resign to the restrictions of its physical three-dimensionality, but tries to break through the boundaries of its own volume · Paradoxically the volume can only be set free and become an ‘open’ container when the restricting surface becomes continuous and homogeneous, like the loose elements in the time-space continuum (De Stijl), like a comprehensive constructive network (Frei Otto) or like a stylized, glove-like membrane (Philishave)
I have seen during the last year various claims on “a 3d printed car”, a “3d printed house”, a “3d printed office”, a “3d printed airplane”. The UAE announced that by the year 2020 25% of all new construction will be 3d printed. What of this is really true? What of this is likely to happen?
3d printed office Dubai | Killa design | 2016
What is 3d printing?
First of all we need a definition of what is 3d printing. For sure it an additive technique, not subtractive, meaning that one adds material to form the object. Being additive does not cover the intention of 3d printing though, since all on site concrete would be 3d printed according to that definition. So the definition will need some more specification. The process of 3d printing must be automated, robotized, controlled from a distance, executed by machines, not by people handling hand-held tools.
Slow cooking
But even then, a fully automated concrete pouring machine would not be very relevant since it would automate a traditional process which is not very smart. Even when the pouring process would not need any molds, as could be the case with a rather slow procedure using quickly hardening concrete, that process would be nothing more then an mechanization of an known procedure. Such slow cooking 3d printing process could be compared with an automated horse, which would be just an automation rather than inventing something new like a wheeled car. Well, we still count car’s propulsion forces in horsepower, proving how strongly past customs survive in today’s vocabulary.
3d printed office Dubai| contour crafted components | 2016
Less than 10% is actually 3d printed
Is it right to call something a 3d printed home when only 10% of the whole is 3d printed? We need to be honest about the amount of 3d printed parts of a 3d printed car, a 3d printed home etc. The best I have seen so far is a 3d printed framework, representing less than 10% of the total enterprise of assembling a car, of putting together a house. The examples I have seen rely heavily on exterior and interior finishing for the walls, the floors and the ceilings, and on additional handcrafted efforts to establish a precise bond to windows, doors, let alone the wiring and plumbing of the house. I know the ultimate goal is to print complex hybrids using different materials for their different functionalities. But the inconvenient truth is that we are far from that point.
Promotional vehicle
Recently I have seen the 3d printed office in Dubai, a promotional vehicle as to promote the Museum of the Future, an excellent design by Shaun Killa architects from Dubai, scheduled to be completed before 2020. Also the the 3d printed part of the office is no more than the raw and rough core structure, counting for even less than 10% of the completed building. The shape it suggests from the outside is not what is actually 3d printed. A elaborate structure has been added to the 3d printed core as to hold an doubly curved stucco facade. The strangest thing is that introducing 3d printing techniques has caused an excessive amount of traditional labor as to end up with a proper finishing. Yet as a promotional vehicle it works very well as the take off for the ambitious governmental promotional campaign to build 25% of all construction with 3d printing technology by the year 2030.
3d printed office Dubai | Killa design| 2016
Can it be scaled up?
Yet the biggest inconvenience I feel towards 3d printing is its inability to be scaled up to the grand scale of larger buildings and larger machines. Now it is feasible to 3d print in a meaningful way smaller things like scale models, rings, parts. Scaling up tenfold in all three spatial dimensions means multiplying 1000 times for the object. Thousand times in production time and another thousand times of material costs. In other words we are factor one million away from economically 3d printing parts that are ten times bigger than the examples around. No way that optimization of the 3d printing process and topologically optimizing the deposit of materials can compete with that reality in the near future. Not for the bulk of work that lies ahead of us.
3d printing is for the long tail of economy
So when 3d printing concrete for larger structures that need to be built fast is a not such a smart idea, what could be a smarter approach using 3d printing technology? Will 3d printing be scaled up to cars, homes, office, towers and larger structures at all? My view is that it will happen in the consumer market, but not to replace the larger structures and not executed by the larger companies. I believe it may flourish among individual customers representing the long tail of the economy. Roughly half of the global economy will be managed by ever growing multinationals, while the other half of the economy is privately managed as to express individual lives. A form of basic income could pump up the length and mass of the long tail.
The challenge is to 3d print complex hybrid components
But that is not the whole story, 3d printing has all my attention since it allows to design and produce series of unique components. The great thing about 3d printing is that we no longer need to build molds, or that the molds become the load bearing building blocks themselves. It allows for the assembly of series of small and medium sized components to complex and hybrid larger structures, and deposit materials where and as needed. My own research heads into this direction, into the direction of the design and production of made to measure transportable chunks of a complex 3d puzzle, hybrid components integrating every aspect of material composition, structure, skin, distributed building physics, practical finishing and attractive ornamentation. And its needs to be able to be 100% recycled and display overall good performance in design, production and in use.
Surface quality
Mind you, none of the examples around today come close to having a nice surface finish, nothing like a serious structural capacity on the larger scale. I have seen no integration of climatic control unless used as a second perforated skin. And certainly not the much needed exactness to fit to other components, as to fit seamlessly to the 3d printed parts.
Trapped in the delusion
So let’s be serious about robotic 3d printing and robotic assembly of complex parts, let’s put the bar high as to trigger much needed practical inventions. Let’s design to produce a serious structure which features all aspects of a modern comfortable building. Otherwise we will be trapped in the inconvenient truth of the 3d printing delusion.
First of all I wish to reposition the human condition as we usually feel it and perceive it. I do feel the need to mentally reposition ourselves in the evolution of human society so far. My opening statement is that from the moment we started using tools as the extension of our bodies, we entered a robotic condition. From the moment we started to use a hammer to nail hard material into somewhat softer material we not only extended ourselves with tools, but we also started to interlace ourselves to systemic relationships between things. Using tools is where the Internet of Things and People really started. Let me give a few examples to illustrate this opening statement. The point that I wish to make is that we can no longer discuss human society without describing the intrinsic relationships between people and things / systems, we must take into account all things, tools, systems and environments. I abandon the anthropocentric view and look at things from levels up into the macro-world, and simultaneously from levels down into the microscopic universe.
A Space Odyssey 2001 | Stanley Kubrick 1968
Coevolution of things and people
Let us imagine a cabinetmaker in the workshop, which represents already a huge step in the evolution of the society where we take part in. I have to put emphasis on “taking part in” since already in this situation we can no longer maintain the position that humans have full control of this environment, that the cabinetmaker has full control over the tools that are used and the space [s]he is working in. The cabinetmaker plays a role in the systemic relationships between things and the self. There would be no nail if there would not be something like a hammer, there would be no hammer if not a person to hold the hammer. Things like hammer and people live in a symbiotic relationship, and in the context of today I would even say that things and people live in a systemic and indeed robotic relationship. The person is integral part of the system, but is not controlling the system, the cabinetmaker coevolves with the tools, the materials that are prepared for further operations, and the space one is working in. In this workshop condition the person is needed to fire the action, to pick up the hammer, to force down the nail into the wood. Seen from the perspective of the workshop as a complex environment the person is used to activate the tools and to put together the product. This we can visualize by speeding up time in a time lapse movie, and we actually see the cabinet come into being without even the trace of the cabinetmaker, he will appear as a ghostly appearance as to feed the workshop, he basically functions as the energy and the information that is used to compose the piece of furniture in that specific environment. The workshop is a metabolic cell that generates cabinets using the workforce of people as carriers of energy and information. Information is processed via the bodies and brains of the cabinetmakers to the tools and materials. The human body functions as an information hub in a much larger system of propagating information. Information feeds upon the human body to be processed, demonstrating the verifiable non-anthropocentric view on society. The higher purpose of the existence of human beings is not their own lives, neither the further development of their own species, I believe people exist only to function as a carrier to process information and to propagate processed information. In a similar fashion the car body is a carrier to distribute information, which in its turn is carried by people. The purpose of the Internet is not to be convenient to people, but to distribute information on a global scale. Information thus has become highly successful in evolutionary terms, and is soon expected to massively radiate out of our solar system and into nanoscales as to propagate further, perhaps until galaxies and quarks will find out that they are part of the same logic. In that larger system of things and people the mundane workshop is a cell of a larger body which is called the city, which in its turn is a hub in society at large.
Non-human robots
How robotic is that? How robotic is such deep mutual relationship between people and things? We do not need a robotic arm or a robotic vacuum cleaner to mark the emergence of robotic environments. Robotic environments started to form right away after the dawn of systemic intelligence, extending versatile human bodies with mobile tools and instruments. The fact that these tools are not fixed to the human body does not make them less of a direct extension. It is exactly this mobility that is the fascinating aspect of “recent” [millions of years] evolution. Things and systems are deeply linked to bodies without a physical connection. It is exactly for that reason that I am not impressed by performances with explicit robotic extensions that are fixed to his own body. To me that represents a pitiful misunderstanding of what evolution of information is actually doing with us, and what humans are doing with evolution. Similarly I am not impressed or even annoyed by constructing robots with the intention to copy human behavior, as to walk, grip, sniff and snooze.
Vectorial bodies
Now imagine the driver car highway system. We can look at this system from different perspectives, from the perspective of the highway, the car and the driver. Let us first look at it from the viewpoint of the highway. It is fair to say that the highway processes the cars, that the highway actively digests a variety of cars, trucks, vans, motorbikes, basically any vectorial body that is fit to join the industrious traffic swarm scanning the global highway network. This process of digesting cars never stops, there is not a single moment that the highways and other roads stop processing. Sometimes they may process more cars, and then fluctuating to less car movements, but the highway is always in action. Even when the road is blocked for maintenance it must be seen as a form of action. And sometimes the hungry highway system may be temporarily blocked by traffic jams, yet always offers a bypass for their mobile prey . New highways are being constructed all the time, some old ones are fading away, new and more intense networks are made as to facilitate the evolution of information. Indeed, highways are information processing machines, delivering data carriers from A to B and back again. Such network of highways is very much alive, it never stops pumping cars through its veins, and is bound to increase its capacity in the coming decades, eventually to make place for a new intelligent transport system exchanging packages of information in a more efficient way. What drives the system? Who is the driver, who is the driven? Are we humans really the drivers of this system? Or are we as is the position I will take in this paper basically a form of data for the transport system, packages of information that are carried by our bodies, which in their turn are hosted by the cars, which in turn are processed by the highways. Driving a car one may have the illusion that one is in charge, that one is free to choose where to go. But in fact the journey is very much predetermined, governed by precise rules of conduct. Even more so when automated vehicles will become the norm. Free will is relative, which both applies to the human driver, to the car rolling on the highway, as to the highway processing the cars. I consider the road system to be a real time behaving input – processing – output machine. Each perspective is just as valid as any other point of view. The car has no meaning without the driver, the highway would not exist without the existence of cars, the human body would not be considered a driver without the idea of a car. Drivers, cars and highways form one complex interwoven system, fully coevolved in their doings . Drivers, cars and highways, all of these can be considered robotic as they execute certain mutually related tasks following a strict yet slowly evolving set of rules. Robots that work. We robots .
The body
Architecture is considered in this context as the interface between the flow of people and the building components, the buildings themselves and the built environments at large, including infrastructure like highways, airports, harbors. Humans are embodied in their bodies , but what about buildings and infrastructure? Are they contained as bodies too? The logical consequence of the operational metabolism of buildings is that buildings must indeed be considered to possess a body. Buildings feed on material they are absorbing, basically everything that enters the semipermeable membranes of the house, as there are people, water, gas, electricity, data, air. Buildings process that information and convert it to something new or different. People rearrange things in the house, wear them out, throw them away, bring in new products. Water is injected in the house, rubs hands, bodies, forks, knives, waters the plants and leaves the house in a slightly contaminated condition. Gas feeds the oven and the gas boiler, is burnt and thrown out of the chimney. Electricity feeds the lights, TV set and other devices. Data feed your computer. Air is let in as to dilute the contaminated air. All these processes are in essence based on information exchange between the smallest nanoparticles. People leaving the house are uploaded with new information as distributed by television, radio or the internet, and they disseminate this information to other people, via notes, messages, spoken word, gestures. Information has been processed by the building, with people as the enzymes facilitating that process. Without people operating the body of the house that house would be a dead body. But viewing the bidirectional process from the other end is more telling. Homes are a necessary attribute of society. Homes have their own metabolism, arrays of homes congregate into buildings, along streets, which again have a metabolism of their own. Not functioning apart from people but intrinsically interwoven with the operations people execute on the buildings. So we are talking about a coexistence of homes and family, of buildings and communities, of city and society. We as people have become deeply linked to the built environment, in such a way that the one can not be seen separate from the other, they have built up a bi-directional relationship, ever evolving as to feed the propagation of information.
Information processing vehicles
In a similar way of looking at the coexistence of people and things the infrastructure of highways and secondary roads are processing vehicles in a nonstop process. Vehicles are like packages of information, carrying and delivering information to remote destinations, information in the form of people, who in turn are carriers and processors of information, or in the form of books, goods, stories and designs. The infrastructure is a huge extensive globally distributed information processing machine, interacting with other such machines operating at different scales, like the aviation network, the containership network, the bicycle network, the invisible communication networks, radio and television networks. The highway network is a machine that executes complex series of actions, and is programmed by its design to host the swarm of vehicles in a complex manner. Complexity is based on simple rules, the outcome of the process looks complex when viewed from outside the system. All such complex networks must be considered to constitute a body , whether physically contained in a body or ephemeral contained in software and rules of conduct.
Robotic bodies
Now that buildings infrastructures and their programs have been identified as bodies , the question that must be raised here is whether these building bodies and those infrastructural bodies are robotic by nature . Nature as we know it is considered here as a computation, based on information exchange between the acting players, whether big or small. How do these building bodies actually operate? Can they be stopped at all? Is there an on / off button? Are they being operated or do they operate? Can they die? Are they born? How are they produced? Most likely answer: by the people – workshop / factory complex adaptive system. How did they come into existence at all? The most essential definition of a robot is that they are constructed bodies that “work”. Here we are, houses work, buildings do work, cities work, infrastructure works. Robots do not need to resemble people to bear the name robot. I will adopt here the broader definition of what a robot means to us and to our society. The narrow definition is according to the Oxford Dictionary : “A machine capable of carrying out a complex series of actions automatically, especially one programmable by a computer”. Since I consider the global highway network a “machine” that feeds on vehicles, which in their turn are programmed by people and gas, and since as seen from a non-anthropocentric viewpoint they can not be stopped to do so, hence automatically carrying out their actions, and while they are programmed to execute their tasks of facilitating the flow of vehicles, the highway network must be considered a robotic body. We live with them, live in them, and can not live without them. Our lives and the lives of the robotic environments are deeply interlaced and form a co-creative steadily evolving being .
A Day in the Life
This paragraph intends to elaborate upon the intrinsic relationship between people and machines that surround them and are operated by them. Whether we like it or not, you are bound to be intimately linked to a machine or system of some sort for most of the day. You are caught in machines, which in turn are caught in systems, and it feels so natural that you don’t feel that you are taken hostage. Let’s experience a day in the life, and simply register how and how long you are communicating with some version of a machine. Or, in other words, to what extent you are an analogue robot dancing with a mechanical slash digital robot. The tour of a normal day featuring extensive robotic interplay. A typical day starts with the alarm clock. Just this seemingly innocent fact links a person to a global system of time construction, time manufacturing, time processing, time management. Setting and obeying the alarm clock means accepting the intrinsic interlacing with a global system, meaning accepting one’s position as a player in the same game, on level playing field with the robotic alarm clock. Setting the alarm clock, organizing your agenda, living up to its input, linking you to other people’s time management, imprisons you voluntarily for hours in a day to globally arranged robotic time fabrication systems, both in terms of hardware and software. Then at the dawn of the day I switch on my espresso machine. The entire process of operating the machines to fabricate the cappuccino and to consume it chains me voluntarily for at least 15 minutes, to be repeated several times a day. Then I may take a shower, brush my teeth using the electric machine, and again I am linked to a very complex system of infrastructural water treatment installations, to a range of sanitary products, indirectly to some factories worldwide to produce them, to resellers that sell them to me, to advisors and dentists that advise me on my demand, again this links me in a robotic fashion to such sanitary environments. Should I go on? When analyzing a full day one is almost 100% intimately related to machines, to systems, to procedures. It is only the variety of crosslinking and entanglements with machines, systems and procedures in short with robotic environments that makes one feel self-determined. But in the end every citizen is ultimately full time dancing with machines and procedures. Who is the robot? The position I take here is both the analogue biological player and the mechanical and digital machine are bodies that are interacting with each other. Neither of them can live without the other. There is no life as we know it without being so intimately linked to mechanical and digital bodies, while the machined bodies can not exist and evolve without them being linked to analogue players. Living with products links you to the product industry, watching TV links you to the entertainment industry, using your cellphone links you to the ICT industry, sitting on a sofa links you to the domestic industry, paying your bills links you to the financial industry, driving your car links you to the automotive industry, living in your house links you to the building industry, walking on the pavement links you to the infrastructure industry, filling your gas tank is linking you to the energy industry, playing tennis links you to the leisure industry, there is virtually not a single moment in your life that you are not linked to people and things. There is a strong mutual independency between people on the one hand and things and systems on the other, which makes me believe that nature and products must be seen as one integrated ecosystem, where old and new nature are not seen as different ecosystems that are fighting each other. There will be no winners, no losers, only the further propagation and as of now unpredictable transcription of information. Taking it to the extreme, nature as we know it, enhanced with product life, may eventually evolve towards information in another disguise. We are temporary carriers and processing units of information, just like quarks, atoms and molecules. We are feeding an explosive increase of information content of the crust o the earth, eventually leading to popping out of the globe into deep interior and exterior space.
The Body Plan
Bodies have a plan, they evolve according to a plan, they live a lifecycle plan, they love it when a plan comes together, and eventually they fade out, are destroyed, or simply disappear. From here on I will focus on building bodies, and leave infrastructural and organizational bodies out of further considerations. How do building bodies come into existence, how are they constructed, how do they operate, and how do they survive or die? In earlier writings [Oosterhuis, Hyperbodies, Towards an Emotive Architecture, Birkhäuser 2003, ISBN 3-7643-6969-8] I have proposed to give any design proposal legal birthright as from the very first conceptual idea. Meaning that no one owns the design except the design and later the built building itself. The building design grows up to transform into an explicit, often physical identity, as a player in the fabric of the city, naturally with the right to “speak”. Un-built designs keep their ephemeral identity, and live their lives in the minds of people, in texts, in images. Hyperbodies grow according to a body plan, which is not a blueprint, but rather a genetic code, instructing simple rules of cell division and cell specification. Hyperbodies are informed bodies, similar to hypertext as an informed evolution from plain text, and hypersurfaces as digitally augmented surfaces of building bodies. As always symmetry plays an important role in the making of bodies according to their body plans. Although not noticed by architectural critiques, de facto all of my designs whether small or big Waterpavilion, our many housing projects, iWEB, A2 Cockpit, Bálna Budapest, LIWA tower are symmetrical in their basic layout. Only allowing for a local asymmetry when it comes to responding to specific local conditions. Sometimes rotational symmetry is used as in the Waterpavilion, where at one side the feature line of the fin goes up towards the nose, at the other side going up towards the connection with the alchemist style NOX sector, indicating where the openings are, the main side entrance and the emergency exit, both detailed as cutouts on the sides of the body and skin as to maintain the fluidity of the body. We see similar detailing in car bodies, where the door always embedded as a side entrance as to go with the flow is cut out from the body skin and the body structure. Understanding body plans and their inherent detailing is crucial to understand the nature of robotic environments,. I will explain why robotic buildings simply need body plans. As pointed out before, humans and their tools / vehicles have coevolved, whereas the evolution of humans mainly took place by enhanced connectivity to things and other people in their brains, by evolving language by labelling things and tools, since they already had the mobile body to free themselves from a fixed coordinate on earth. The coevolution means a mutual dependency of humans and their tools, vehicles, building bodies and societal systems. People spend most of their day connected to clothes, machines, tools, and de facto always connected to buildings and transport vehicles. Reviewing a day in the life, counting how much time you have spent brushing teeth, making coffee, listening to radio, sending email, driving car or bike, using keys to lock and unlock spaces / buildings, checking your cellphone for Facebook or Twitter, cooking food, get dressed, sit on chairs, tables, writing code, working with robots, drinking beer, perform differential calculations, you will feel how deeply one is embedded in the built environment. You are basically always interacting with some sort of system or machine. The systemic links between tools, factories, distribution channels, selling points, buyers, users and communities are so strong that using such a tool means being active part of that system. That global system of humans tools / vehicles / buildings interaction is a continuous operation, it never stops, the systemic components are always in the process of being made and always in the process of being used, therefore that system must be considered to be processing information , temporarily “on air” until it is replaced by a further evolved system.
Specification of components and spaces
The building components of the building body are the constituting cells of their bodies. They have evolved over a long period of time, and are getting smarter over time. Having left the period of structural brickworks far behind although some diehard old school architects still regret this we are now entering a phase in the building industry where the constituting building components are becoming smart informed components, both in the design process as in the fabrication process and in the process of operation. Building components have started to talk to each other, and some building components will be equipped with actuators as to act in real time on specific requests from externally and internally changing conditions. Smart in the design process means that the designs are programmed, scripted, generated, bred, co-created on the basis of open collaborative design systems. I have developed applications for climbing walls [Climbing Wall, ONL 2012] and acoustic ceilings [Acoustic Ceiling, ONL 2014]. These applications offer an open platform for designers and users alike to design their own climbing wall and their own acoustic ceiling, as long as they follow the simple rules as set by the designers of the parametric software. For the climbing wall and the acoustic ceiling the solution space for the designers is extended to include nonstandard complex geometries, therewith offering a maximum of design freedom for the co-creators. The nonstandard design paradigm is an inclusive approach, allowing for traditional rectangular designs as well. Each of the constituting components in such open design system is principally unique in its shape, dimensions and properties, such smart design component is “only that, only there, and only then”. The body as a result of the design process consists of thousands of such unique linked components. For example the A2 Sound Barrier [ONL, 2005] consists of 40.000 unique steel components and 10.000 unique plates of glass. Together they form the body of the structure that communicates freedom of expression and synthetic integrity at the same time.
Digital design to production
Bringing the discussion back to daily work, it is necessary to discuss the principles of the digital “design to production” and “design to operation” processes. Digital design to production means nothing less than a revolution in the building chain of built environments. Architecture will never be the same. Digital design to production is by definition based on code. Designing with code unravels new horizons both in the world of design as in the world of production. Taking advantage of the architecture of the CNC machine these machines read code, not drawings or 3d models an immediate relation between design and machine can be established. Writing code forms the basis for parametric design methods as well, meaning that a systemic design to production procedure paves the way for an unprecedented nonstandard, extreme customization of the design and production of the individual building components, the only limitation being the imagination of the designer and the physical constraints of the machines. Freedom of expression here does not imply extra costs, exactly the opposite is true in my designs, the design to production methods I have designed and executed have proven to be time efficient and cost-effective. The A2 Car showroom is built for a mere 750 €/m2, while the A2 sound barrier where the Cockpit building is embedded in, has been built for a mere 450 €/m2. All compo0nents different and yet competitive with the standard sound barrier as promoted by the Ministry of Infrastructure. The cost advantages are both in the design process, which literally saves 20% in each phase of the design process, from preliminary design to execution, and in the production process, while no information has to be redrawn and nothing gets lost in translation, that is two times for effective than a traditional linear chain of design, engineering, tendering, contracting and manufacturing process. Today’s CNC machine are capable of dealing with difference much more than is typically used by the designers. The machine really does not care whether it produces series of the same or series of unique components, it all depends on the code it is reading. The ultimate freedom of architectural expression can be disclosed when the designer produces code instead of using traditional (3d modeling, which is basically an optimization of a traditional linear design process, design techniques that need to be translated into code. Many possibilities are not taken into account or will get lost in translation, when not thinking as a programmer-designer. Clearly architectural programming must form the core of teaching during in courses and design studios at architectural schools from day one the high school students enter the faculties. This is what Hyperbody [TU Delft, 2000] has introduced since the establishment of the chair in 2000. Students will need to get acquainted with thinking like a programmer, to write code, and to instruct the machines in the most direct way possible. Designing and producing will naturally become an iterative creative process, where the design is almost instantly informed by the potential and constraints of the production [and operation] process.
Emotive embodiments
The future of architecture is just this, precisely here and exactly now. The unique building components that together constitute the building body keep their unique identity over time, meaning that that they can be addressed in the design, production and operation process individually as to perform . Each building component is potentially an actuator, either processing data in an otherwise solid cell / component, or actuating the cell / component by changing its shape, dimension and / or performance. Actuating cells of the building body are relatively dumb, processing only a few simple algorithms, yet in sync with their immediate neighbors. The Hyperbody research group at TU Delft and ONL have designed and produced a wealth of interactive prototypes, all of them to considered today as robotic embodiments, realized decades before we referred to them as robotic installations. Now we consider these interactive installations robotic environments, as to fight the idea that the robots would look like humans and copy human behavior. Recently ONL’s NSA Muscle project was already archived in the CCA, the Center for Contemporary Architecture in Montreal, as part of a show curated by Greg Lynn [Archeology of the Digital, Media and Machines, exhibition in CCA Montreal, 2015]. ONL and Hyperbody have developed CNC driven design to production methods to realize in practice the complex geometry that gives shape to their design concepts. As demonstrated above, I consider existing buildings, also the most primitive adobe houses, as a simple form of a robotic environment, since they are processing materials, people and data without ever stopping to do so. Now when building components are no longer made of mud, brick or steel, and become tiny robotic environments in themselves operating as in a swarm, I suggest to label them emotive robotic embodiments as to differentiate from the static shells of the environment. These emotive robotic environments are so complex in their behavior that they are experienced by humans as living things, as emotive embodiments.
Society of robots
The word robot typically is used to indicate that something works, something that acts, functions in real time, something that is processing information. Now when we consider built environments as environments that work while processing data continuously and are composed of components that work while processing data in real time, we can rightfully state that we ourselves live as soft bots in a robotic world. A robotic world that is handmade robotic since millennia, machined robotic since centuries, and additionally programmed robotic in the 21st century. Whether we like it or not, we live in a society of robots and robotic systems and people are their coevolving teammates, living as embodied people in the Internet of Embodied Things.
*) Vision paper by Kas Oosterhuis originally written for the CCC Conference Emotive Embodiments at the TU Delft in CCC Conference in 2015.
Interview by Marwa Al Sabouni of the Arch-News portal from Homs, Syria. Marwa Al Sabouni is the author of “Battle for Home”.
Marwa Al Sabouni: You identify yourself as “Expert formerly known as the architect”, you also give lectures to students to introduce them to the term “information architect” how have the mission of the architect changed in our modern times; and is technology is the only cause for this shift in thought and related terminology regarding the profession of architecture?
Expert formerly known as the architect
Kas Oosterhuis: After having written my book Towards A New Kind Of Building [NAi Publishers, 2011], I asked myself publicly what exactly is the expertise of today’s architect? The easy answer is of course that there are many types of architects, but the question I wish to discuss here is if we should consider ourselves “generalists” or that we perhaps are professionals in a more specific field of expertise? The problem is that at my faculty at the TU Delft the dominant concept is indeed that of the generalist: hovering over all disciplines, the puppeteer who pulls the strings, the one who makes the end-decisions, the one who is top-down dictating the rules of the game. In our educational system the students are given the illusion that they will be the ones that decide. But I know from practice that the reality is different, there are many puppeteers who make important decisions on various fields of expertise, in a most complex way woven together as to develop the one-off product. It is my conviction that we all should respect each others expertise, including that of the climate designer, the structural designer, the quantity surveyor, the user, the client, the interaction designer, the material designer, I consider them all to be experts in their field. I want to work with them in a level playing field, that is why we are developing open collaborative design techniques as to work 1:1 with any other expert in any stage of the design to production and the design to operation process. Now we come to the question I have avoided as of yet: what then is my expertise and that of my team? The not so easy answer is: basically we are experts in the [digital, parametric] programming of the spatial interaction between the constituent components of the construct, be it a chair, an installation, a pavilion, a building, an urban scheme, or a work of art. As an important sub-expertise of ourselves at ONL and at Hyperbody TU Delft we are experts in the real time behavior of the constituent components, dealing with interactive architecture.
Academia and practice
MAS: You are a well-known professor and professional expert in the field of architecture; teaching at the Delft University but also practice in both fields (academic and professional) in the Gulf region; where those two fields meet in your opinion?
KO: At the university I am a professor from practice, I bring in the experience, knowledge and skills from practice into the university. In practice I am often considered as a scientist, someone who wants to know exactly how things work, someone who is not satisfied with vague ideas, metaphors and illusions, but wants to see the proof of the concept. I start with coining a hypothesis, and then test it on all levels, from design to engineering to production to the actual usage of the building. If someone challenges the hypothesis with good arguments, I listen and adjust the design concept accordingly. I am reaching out for expert opinions from other experts. Likewise I develop a real opinion on things, step by step constructing my own scheme of things, my personal universe, which is partly emotional and partly rational. In this respect it helps a lot that my partner in life and business Ilona Lénárd is a visual artist, and looks at things from a different perspective. Since 1989 we have decided to join forces and dedicate our studio to the fusion of art and architecture on a digital platform. So it is not only a match between the academic and the practice, but very much the cross-disciplinary approach that characterizes our methods of working. Cross-disciplinary design requires empathy with the other, allowing the other to bring in their expertise and their emotions, and it requires to find ways and procedures to make the match without ending up with a half-baked compromise. This is the real challenge, how to set the rules of the collaborative design game such that the unfolding of the process generates surprising new insights.
New kind of beauty
MAS: The identification of beauty has been an area of philosophical investigation for a long time; today you are promoting a “new kind of beauty” how do you define beauty today? Namely, what are main characteristics and values of a beautiful object of the 21st century that are different from an older one?
KO: In my TEDx lecture in Delft [https://www.youtube.com/watch?v=8tvsQLeSK-U] I challenged the audience to understand that we are changing your view on what’s beautiful. We also post that statement on our ONL website. The leading theme of my talk was the paradigm shift towards mass-customization as the logical further development of mass production. I am not criticizing mass production as such, since it brought our society where we find ourselves right now, but I challenge the production methods as to produce series of unique products, series of unique building components, potentially leading to a until now unseen natural magnificence of complexity. Complex but not complicated, since complexity is based on a well balanced set of simple rules. And mind you, such complexity based on mass-customized CNC design to production methods is no more expensive then regular mass produced buildings. The CNC machines, provided that they are given the proper data, do not care if they produce series of the same or series of unique elements, for the machine that is similar and requires therefore no more production time. Consistent application of mass customization thinking and production, and then I mean not only roofs but the building as a whole, lead to a thoroughly different aesthetics, where repetition of any kind will no longer be considered as beautiful or even functional, but rather as a remnant of past eras. the century which lies ahead of us will be dedicated to the beauty of continuous variation. The New Kind of Beauty is a natural beauty, radiating its inner beauty without having to compensate with extensive make-up.
Continuous variation
MAS: Many of the modern works of architecture toady adopt what has become known as “Parametricisim”; do you think of parametrics as a distinctive architectural style or as a method of production? And how so?
KO: In fact the realized works based on parametric design methods are very scarce indeed. And when parametric design methods are used, they usually are confined to parts of a building, not to the whole, not in any of ZHA’s buildings, only taken to the full extent in some experimental pavilion designs, but even then mostly confined to a roofscape only. I must confess that I do not appreciate the term parametricism at all. First of all since parametric design exists since the early eighties of last century, second because I am against all -isms, I am looking for the real thing, not for derivatives. Maybe this is my Dutch background that I am looking for a deeper meaning, like what the painter Piet Mondrian was striving for in his quest for the universal. And third because I think the term parametricism narrows down the subject too much to a technique, an external appearance. The New Beauty encompasses much more than that, the idea of continuous variation by building relations between all constituent components must settle between the ears of the designer in all stages of the design until completion, in all conceptual assumptions and all procedural programming for an open design environment.
Scientific American
MAS: As an architect where do draw your inspiration from?
KO: My favorite reading is the magazine Scientific American, I draw much more inspiration from science an art exhibitions than from architectural magazines. the inspiration I draw from architecture is by going there and see the buildings themselves, not so much from looking at images. The only way to fully understand a building is to go and see it in real life, to feel the spatial lay-out, to touch the materials, and often to experience how much traditional effort it took as to produce the photogenic image. This is particularly true for interiors of ZHA and Gehry, whose designs create illusions of continuity, but which can only be achieved by many layers of traditional plasterwork, which is for me fully contradictory to the essence of design to production. Well designed buildings should be assembled using dry fixing methods, which is a big issue in the recyclability of the building. The modern car industry already guarantees all its components to be fully recyclable. You might have expected me to draw my inspiration from nature, but that is not really the case. On the other hand I wish to design our buildings such that it feels natural, not by copying external characteristics, but by a deeper understanding of how atoms group together to molecules, how molecules act together as to form proteins, how proteins flock together as to form muscles and bones. I am looking at quantum theory just as well as to natural physics on the universal scale. I want to understand how the smaller components work together to form larger consistent wholes, and how they read external environmental information. I see buildings as complex adaptive systems, as information processing vehicles, rather than as imitations of end-products of an organic nature.
Local data sets
MAS: It is noticeable in our modern world the major retreats of local identities do you think it is important to consider local identity in the work of architecture; More importantly is it achievable through this new design paradigm?
KO: My answer to your question is a clear yes. Relational design methods must be open to local pieces of information, local data sets, in other words to the very nature of local identities. I have always worked like that, trying to understand the spirit of the place rather than copying the obvious external appearances. We were very pleased with the name our client Abdullah Al Nasser Mansoori gave to our office tower in the Capital Centre district in Abu Dhabi. He named the tower after the LIWA desert, obviously because he was born and raised in the LIWA desert, but surely also because he recognized the gentle curves of the ridges of the dunes as caused by the prevailing winds, and the color scheme, which we chose to avoid the building to look dirty after a sand storm. So there was reference to basic climatic conditions and available technology, but not a superficial resemblance. We did not look at the impressive reddish dunes at the Empty Quarter and thought that we should make the building look like that. Not at all, that has been the lucky marriage of an intuitive empathy and rational reasoning in combination with available mass-customization technology.
Scripting
MAS: Is the use of term “scripting” instead of “drawing” only a matter of keeping up with modernization of the terminologies of technology; or does it hold an ontological underlying meaning to it? Can you explain more to us?
KO: My team at ONL produces only drawings as derived from a 3d model to get the approval of the authorities, since they need to literally stamp the drawings for approval. For all other purposes, the design development itself, the design to production procedures, for the interaction with other experts we do not produce drawings at all. We are very careful to avoid producing 2D drawings and fancy renderings since they are in essence a dead-end street, a derivate from the real information. You can not make comments on a drawings and then feed it back to the 3d model, it is double work and too much gets lost in translation. To make it clear for you how we work, we are not clicking together 3d models either, we program them, on a variety of software platforms like Visual Basic, Autolisp routines, Rhinoscript, Maxscript, Processing, Grasshopper, Pro-Engineer. At Hyperbody we programmed our interactive installations in Nemo / Virtools game development program, and using Max MSP to control the sensor data. Basically using those more recently developed softwares platforms is writing code via a graphic user interface. Some of our nerds take it as a challenge to write code directly, in Python or Unity. So you see how deeply rooted working on a digital platform is for us, and bear in mind that it a pure requisite for being to realize buildings like the LIWA tower for a normal budget of a commercial building.
I am not complaining
MAS: You have built major buildings in the UAE such as the Capital Centre in Abu Dhabi and Dubai Sports City in Dubai 2007, beside the aspects of passive design based on the informed data of climate and location; how are these buildings different or distinctive from other projects of yours around the world?
KO: Now your referring to local climatic and/or cultural conditions again. The interesting thing is that we would never have the chance to propose such distinctive designs as LIWA tower or Sport City tower [not realized] in The Netherlands, since there we suffer from a combination of a typical Dutch attitude of acting “normal”, with an absolute dominance of OMA’s ironic modernistic aesthetics. As you know OMA / Rem is quite influential in my country, having produced so many clones, almost half of the younger leading architects in The Netherlands have worked for a while in OMA’s office, and have been deeply influenced by their journalistic, modernistic, retroactive, assumed witty and ironic attitude. As you know, Rem criticizes the iconic repeatedly, and frankly that is not good for us. As a sort of collateral damage, our logic of mass-customization is not widely appreciated by Dutch architectural critics, who are voluntarily subordinated to their dominant turbo language, using superlatives for almost anything. It is exemplary that our A2 Cockpit building – although appreciated by almost anyone who passes by or buys a car there – has not received any direct follow-up in The Netherlands in terms of new commissions. I am not complaining, we do what we do and we do it without any resentment, but this observation would serve well as an answer to your question.
Design the design process
MAS: For many centuries architects had gave their own interpretations of nature and universe including the human body and the human input into the world around him, today’s architectural orientation is more about the way than the form; do you agree on that, and if so, why do you think this focus on the way of form have become more important than the form itself?
KO: I see the design process as to get to the finished product as a collaborative effort on a level playing field by a swarm of experts, exchanging lean data sets in real time as to achieve the higher goal of improving our built environment. This does not mean that each individual expert may not have explicit opinions in their own field of expertise, in fact I require them to have such strong opinions. I request from a structural designer or a climatic designer that [s]he has an opinion on the structure, that [s]he know more than I do. Personally I strive for a balance between a bottom-up process and top-down opinions. I think this is the very nature of any natural body as well. Each organism receives top-down information from its environment, processes that information on the basis of its own genetic rules, and sends out edited information back to its environment. For us it works in a similar way for design processes. Yes, we design the design process much more than in earlier days, we jump into the process, we navigate the process like a gardener as was stated by the musician Brian Eno, but at the same time we develop strong conceptual ideas, which function as external information fed top-down into the design process, to test it against all odds. In conclusion I do not favor the process over the formal outcome, I am not interested in a process that produces indifferent outcomes, which is by the way the very reason we hate the term “blobs” as coined by Greg Lynn when referring to complexity in architecture. Blobs are indifferent in their shape, while my designs are highly stylized [think of car body styling], relational yet explicit, flexible yet distinctive, precise and intentional, yet the outcome of a collaborative open design process.
Information Architect
MAS: What is your advice for young architects in the region?
KO: Educate yourself, learn programming skills, train your intuition, join discussion forums, and go for it. I think the secret for success for younger architects is to position yourself as a team player, having explicit skills, preferably programming skills yourself, and be open for collaboration with other experts of other fields of expertise on a digital platform. Position yourself as an information architect, controlling the data sets of the geometry of the project as to establish a direct connection between the design and the CNC production. Think design strategies that rely largely on CNC production techniques and on dry assembly techniques, as to secure a lean and green sustainable design and production process, and as to secure the sustainability of the life-cycle of the building, thus avoiding double work and waste in any phase of the project. Optimize for complexity and multiplicity, not for mass production.
Strong internal logic
MAS: Your recent project LIWA Tower in Abu Dhabi has quickly become a landmark in the area, was this a main concern of yours in the design process and how could it achieve this from your point of view?
KO: For some reason many of our designs have achieved the status of a landmark, without the explicit intention to become one, they stand out on the basis of their strong internal logic. I think it is in the nature of our rare approach of the fusion of art, architecture and technology on a digital platform that inevitably produces landmark structures. Sometimes people experience our work work as hermetic because it represents a new paradigm and hence constructs a parallel universe in itself, rather than using a common language such as modernism, deconstructivism, rationalism, historicism, high-tech, regionalism, post-modernism, or parametricism. Another often heard comment is that our designs need a lot of space around them, which bias we have effectively challenged with the design and the realization of the Bálna mixed use centre in the historic city centre of Budapest. The Bálna shows that we can weave the new nonstandard paradigm in an existing city fabric without destroying the charm of the old, while adding a strong new element to it.
Bridge the gap
MAS: We at Arabic Gate for Architectural News have launched recently an architectural initiative called “Rebuilding Destroyed Cities” in response to the unfortunate destruction that many of the world’s cities are witnessing whether by nature or man-made; and as you may know many of the cities in the middle east have met sad cases of mass destruction lately; in your opinion how should architects look at those cities; as a tabula rasa that should be built from ground zero or should they built on certain foundation, and if the latter is true; what should the main strategy for rebuilding be about?
KO: I am not really authorized to give a well funded advise for such urgent and very unfortunate situations of mass-destruction. My hunch would be, but I would not be able to verify after having visited those ruined areas, that I would opt for a balanced mix between literally rebuilding the once existing and adding fresh new structures. Complete rebuilding the old may leads to boring cities that feel more dead than alive, while the tabula rasa is not an option for many societal reasons. One will need to bridge the gap between the city one remembers and the unknown future. I believe the most importance issue that one has to deal with is the structure of ownership. Who owns the plot of land, is there enough diversity of ownership to guarantee the diversity of the newly built structures? If there is one dominant owner, for example the city itself, than I would suggest to divide the larger plots into smaller ones as to evolve the multiplicity and variation any city needs to become a desirable place to live an work. A balanced mix of houses to live and places to work is mandatory for a livable city. Strong architectural characters can be imagined from scratch, others can be rebuilt from memory, both attitudes should get a chance.
Having met Zaha Hadid only a number of times personally, I will not reflect on these otherwise memorable encounters, but rather on her work as an emotive architect. Exactly the emotive factor links her designs with mine and not surprisingly also with the Powerlines paintings of Ilona. In 2001 I wrote my inaugural speech for the TU Delft and titled it Towards An Emotive Architecture. I founded the Hyperbody research group at the TU Delft, fully dedicated to the exploration of complex geometry, interactive architecture and real time design games. Over the past 16 years we educated hundreds of young designers in Hyperbody, quite a few of them found their way to Zaha’s office. Likewise our office in Rotterdam functioned as one of the gateways to Zaha’s design studio.
Zaha Hadid | Performing Arts Center | Abu Dhabi 2007
10 x 10
In 2004/2005 Zaha selected our competition design for the U2 Tower in Dublin [2003] and the Web of North Holland [2002] to be represented in the collectioner’s book 10x10_2 [10 architects selected by 10 architects]. I like to think that Zaha and her team were charmed by the emotive nature of our design, by the muscular sweeping shape. Anyway, what I do like about Zaha’s designs is the strong emotional physicality of her sweeping gestures, mostly horizontally stretched, just as far as the arm can reach on the drawing table. Gestures like calligraphy, fully embodied in the middle part of the graph, their tipping points stretching to become a single fine line. Appearing and disappearing. She was clearly more confident with horizontally stretched gestures than with vertically directed sweeps. Her skyscraper designs never radiated the same power as the horizontally stretched designs, merging the building with the landscape. Almost as a rule the curved contour lines of the buildings extended themselves into the landscape, from the very beginning of her career in design for the Hong Kong Peak and the Vitra Fire Station, until her last published designs such as the Performing Arts Center for Abu Dhabi and the Tokyo Olympic Stadium.
Elegant sweeps
And very consistently Zaha’s sweeps are elegant, strong, lighthearted and beautiful. I would not hesitate to label these as a form of sweeping calligraphy, therewith embodying her Arabic background. Zaha must have loved the giant sand dunes south of the LIWA desert. I was so fortunate to have an Arab client from Abu Dhabi who was born in the LIWA Oasis, eventually naming our tower design in the Capital Center district in Abu Dhabi the LIWA tower, it must reminded him of the gentle curves and the colour of his native desert. Zaha obviously had the desert in her eyes, translated into such gently sweeping gestures.
Journalism
Twan Huys did in my opinion in the last College Tour with Daan Roosegaarde a proper journalism job to confront his guest with opinions of respected experts who question how he wants to deal with his fame. Best television I have seen lately. Daan is clearly lifted on the horse by certain media [DWDD, Zomergasten] and supported by the disruptive community, and he simply has to deal professionally with that position. Otherwise his pride becomes before his fall.
Not the person
The critique should not be focused on the person, everyone has the right to be as one sees oneself, be it arrogant, narcissistic, aimable, self-satisfied or the ideal son. The unconvenience is that Daan is seen by many of his followers as a kind of bringer of salvation, while he has seemingly no problem being addressed like that. Yet this is irrelevant in the discussion. What matters is content, what matters are the scientific facts.
Neither the technology
The technology that is used by the popular artist is not subject to debate either, these techniques do work properly, albeit on a smaller scale. And that is exactly the problem with these technologies that Roosegaarde has chosen to apply, these technologies simply can not be scaled up like that. Induction works properly in intimate distances for low energy apparatuses like cellphones, toothbrushes and atmospheric lighting, but effectively not on the grand scale of highways. Similarly softly glowing light embedded in the pavement for bicycle paths can not replace safe lighting. It may indeed lead you the way, but de facto alienates you from the surrounding context. And ionisation works properly in controlled environments but certainly is underperforming when it comes to windy open air spaces.
But the Smog Free illusion
Placing a Smog Free Tower outdoor and claiming that it cleans polluted air of a neighbourhood is comparable to placing your fireplace outside and claim that you are heating up the neighbourhood. It simply doesn’t effectively, and similarly the Smog Free Tower certainly does not clean up a neighbourhood, nor does it clean up properly the indicated ground surface area of some 100m2. I would need verified scientific proof, I would need monitoring the immediate environment of the Smog Free Tower as to get my proof of the pudding, it needs to be verified before making such claim. By stating that it does clean the environment Roosegaarde ignores the huge column of air above which is constantly being mixed up with the lower parts. Even if one would rule that unconvenient reality out, then even a moderate wind would blow every bit of cleansed air away. Air is a gaseous material and want to reach its equilibrium according to the laws of nature. This ionisation technology is proven to work in controlled environments, in closed or semi-closed spaces, and the essence of an outdoor space is that it is not a controlled environment. Therefore Roosegaarde’s tower most likely is a falsification, and therewith creating a counterproductive illusion. What it does is creating an illusion, in which well-meant sweetness people are obviously tempted to believe in, because it would be so nice if it would be true, it feels so good to believe in it. But indeed the followers of Daan Roosegaarde and Daan himself seem very complacent, being very pleased with themselves, drunk on goodness. They must feel they have all the good intentions with the future of the earth, yet in fact they are instrumental in distracting the discussion from real solutions, regrettably the followers of bringers of salvation rather believe in such sweet miracles.